
HG-DAgger ↗#
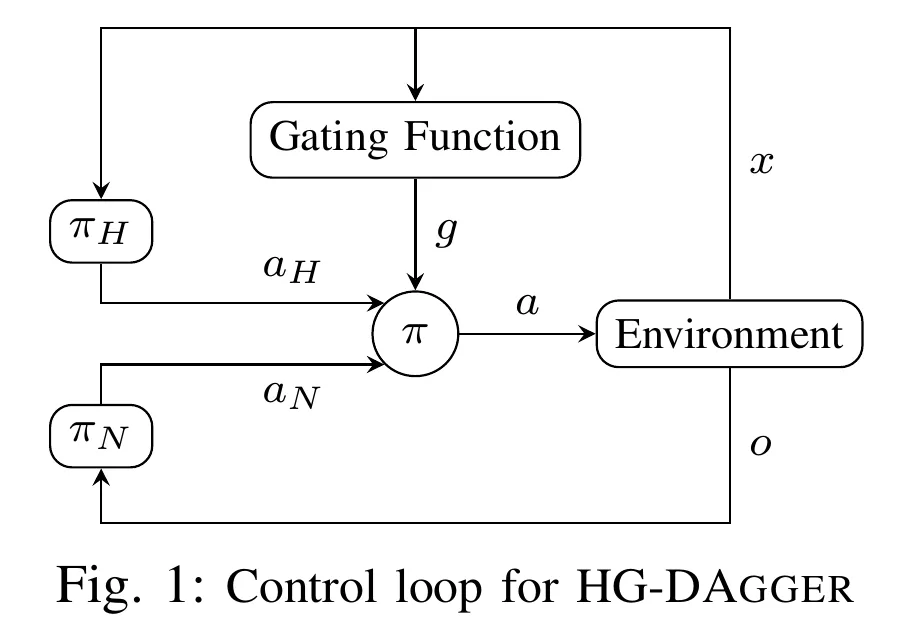
EnsembleDAgger 引入了集成的思想来估计风险,但其安全阈值通常是人工设定的。首先安全性差,其次控制权在人和机器人之间切换时,人类专家会“操作滞后”或者混乱,导致提供的标签质量下降。EnsembleDAgger 引入了集成的思想来估计风险(一组神经网络输出的协方差矩阵 方差越大,定义“疑虑” 为协方差矩阵主对角线的 范数),但其安全阈值通常是人工设定的。
-
输入 (Input) : 当前状态观测 (如车辆传感器数据)。
-
执行 (Execution Loop) :
-
默认状态: 新手策略 (Novice) 全权控制车辆。
-
监控 (Monitoring) : 人类专家 (Expert) 持续观察系统行为。
-
门控判断 (Gating **** ) :
- 如果人类认为状态安全 -> 维持新手控制,不收集数据(或仅作为测试)。
- 如果人类认为状态危险 -> 人类按下按钮/转动方向盘夺取控制权。
-
数据收集 (Collection) : 在人类接管期间,记录 (状态, 人类动作) 对,加入数据集 。此过程持续直到人类主动交还控制权 。(只收集少量救火数据,基础策略已经经过BC冷启动)
-
-
训练 (Training) :
- 利用聚合的数据集 训练新的新手策略 。
- 使用神经网络集成 (Ensemble) 来训练,以便后续评估不确定性 。
-
阈值更新 (Threshold Update) :
- 记录人类介入瞬间的模型“疑虑”值(Doubt)。
- 计算新的安全阈值 (取介入时刻疑虑值的统计平均)。
- (Intervention Log) : 干预日志列表,只取最后25%的数据。
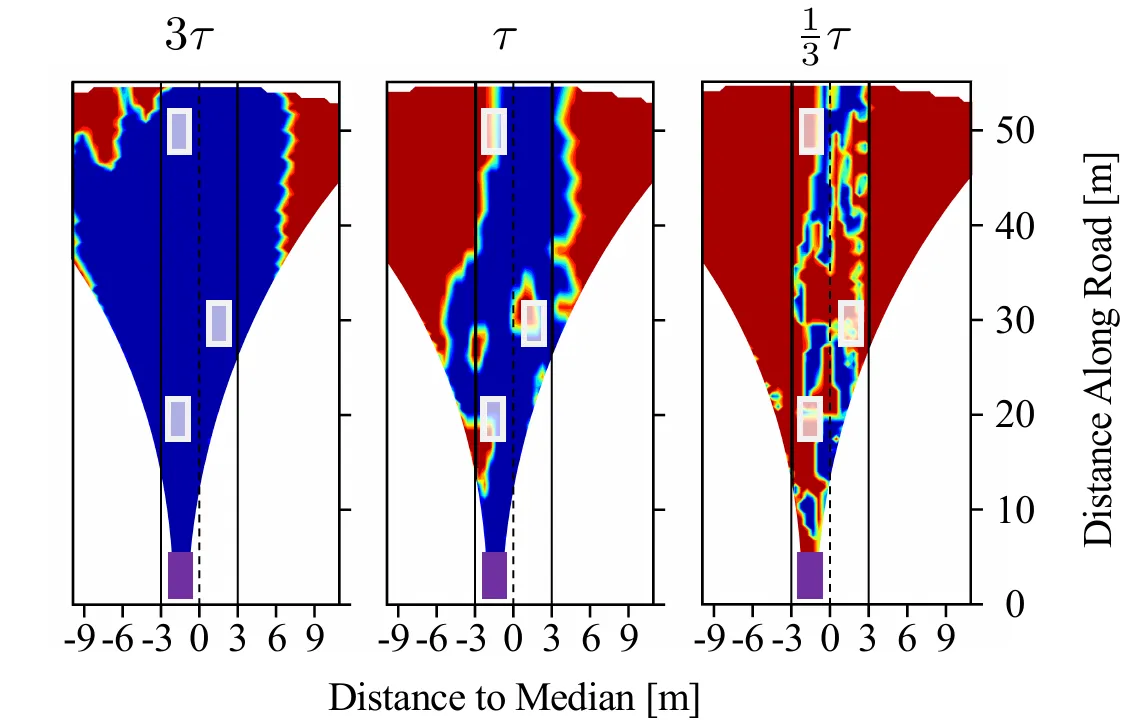
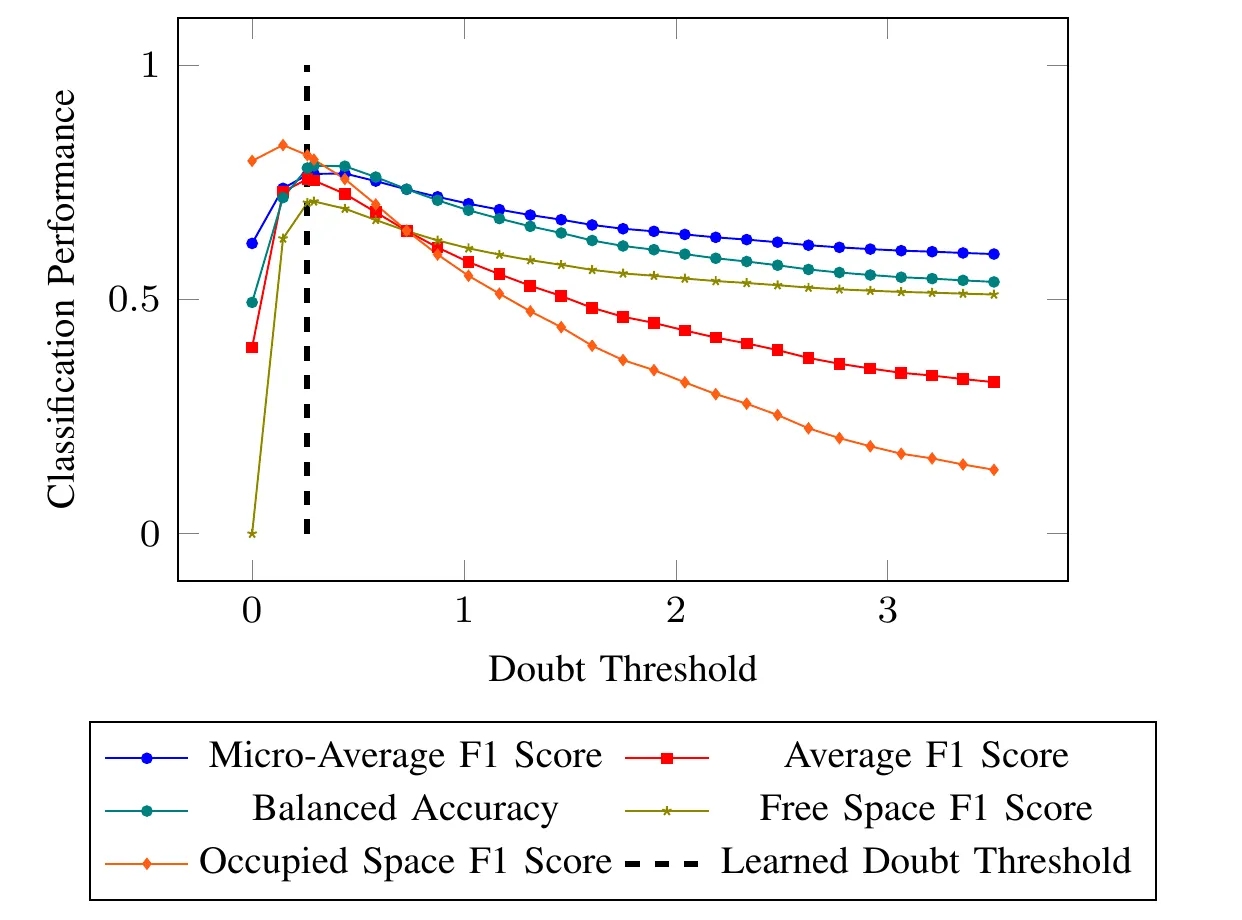
黑色虚线表明:人类凭直觉感到“危险”并接管车辆的那个时刻,恰好对应了区分“物理安全空间”与“物理危险空间”的最佳数学边界。
One-Step RL ↗#
-
Step 1: 行为策略估计 (Behavior Estimation)
- 输入:离线数据集 。
- 操作:使用监督学习(Behavior Cloning)训练一个模型 来拟合数据分布。
-
Step 2: 行为Q值估计 (Behavior Q-Evaluation)
- 操作:训练一个 Q 函数 来评估行为策略 。
- 关键点:这里使用的是 SARSA 风格的目标 其中 (即来自数据集的动作),而不是取 。这避免了 OOD (Out-of-Distribution) 动作查询,非常稳定。
-
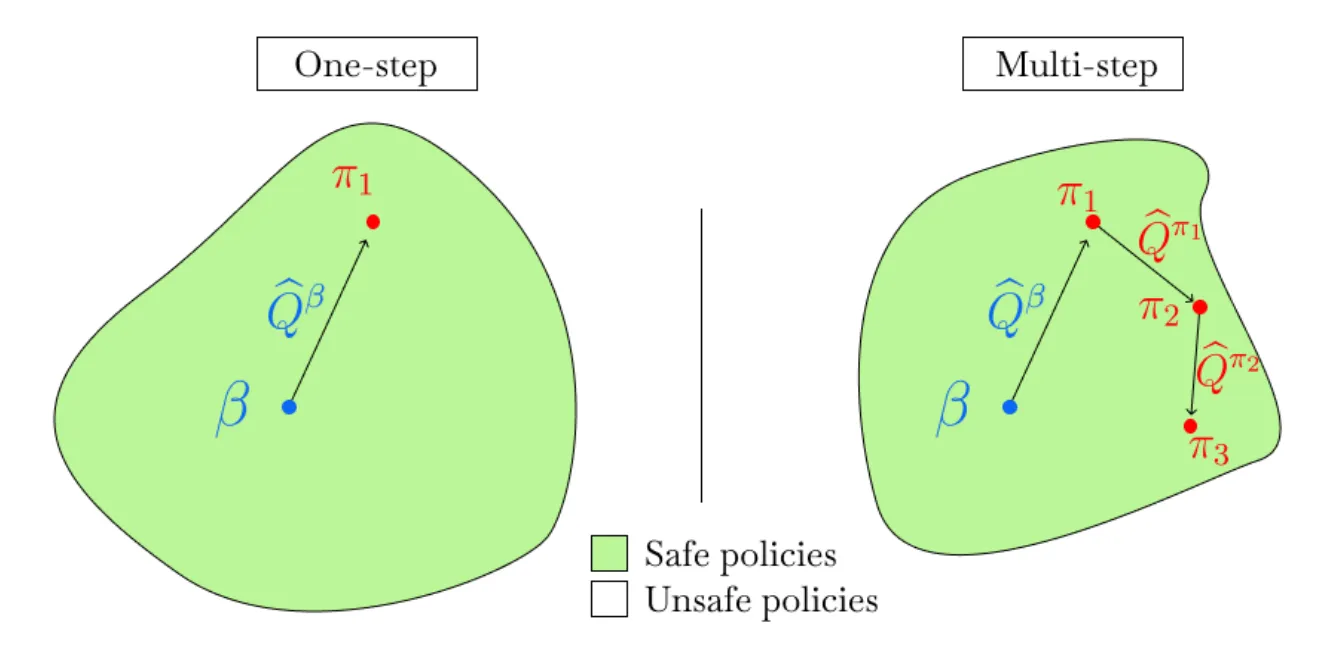
Step 3: 一步策略提升 (One-Step Policy Improvement)
-
操作:冻结 ,求解一个新的策略 。
-
目标函数:最大化 ,同时约束 不偏离 。
-
具体实现:(以下两个方法二选一,Reverse KL Regularization性能稍好)
- Reverse KL Regularization: 。
- Easy BCQ: 采样 个动作 ,选择 最大的那个动作。
-
当你有一个预训练好的强大 VLA 模型(如 pi0 或 OpenVLA)时,这个模型本身就是高质量的 。此时,你可能不需要复杂的 CQL/IQL,只需要做简单的 Weighted Behavior Cloning (类似本文的 One-step Exp. Weight),就能获得显著提升。(待验证)
PA-RL ↗#
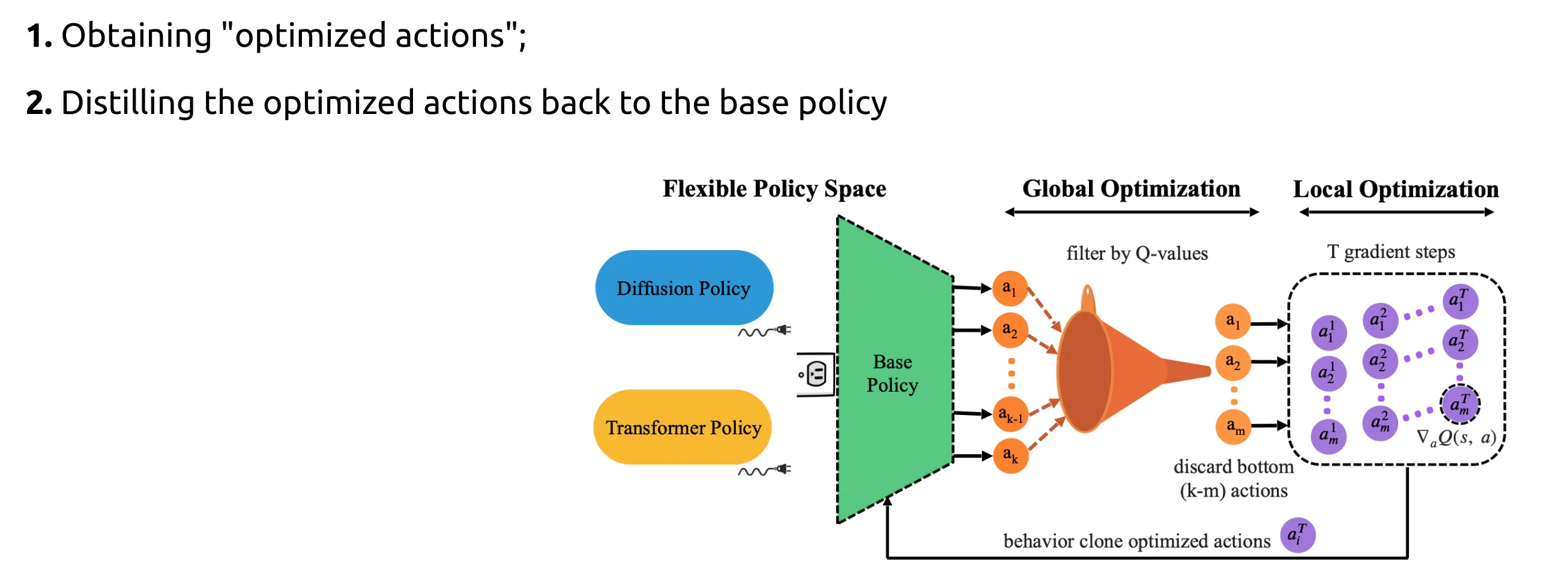
策略无关 RL (PA-RL) 的离线 RL 和在线微调方法,它可以有效地训练多种策略类别,涵盖不同的架构和规模 。我们的基本思路是:只要应用于“优化后”的动作,通用的监督学习损失就可以替代 RL 中的策略改进步骤 。
简单看了一下它的代码实现,是基于CQL/IQL的增量式改进工作。
-
输入: 当前状态 ,当前策略 ,训练好的 Critic 。
-
第一阶段:动作优化 (Action Optimization)
- 采样: 从当前策略 采样 个候选动作。
- 全局优化: 计算这些动作的 值,保留分数最高的 个动作。
- 局部优化 (关键): 对这 个动作,固定网络参数,仅对动作向量 进行 步梯度上升:(这个公式会反复迭代次)。
-
第二阶段:策略蒸馏 (Policy Distillation)
- 将优化后的动作视为“伪标签 (Pseudo-labels)”。
- 训练: 使用该策略原本的监督学习损失函数(如 Diffusion 的 MSE 损失,或 Transformer 的 Cross-Entropy 损失)来更新策略参数 ,使其输出这些优化后的动作。
-
循环: 收集新数据 -> 更新 Critic -> 动作优化 -> 更新 Actor。
可以看出是在做蒸馏,BC算法真的足够强大,只是需要一些技巧。在真机实验中他们采用了OpenVLA架构,Cal-Ql算法和PA-RL的方法,VLA是LoRA微调,Action不断推理保存在Action Cache里面(Policy一更新Cache清空),由于大模型在 RL 信号下非常脆弱学习率很低,为了省钱省时间,Offline 阶段只把 Critic 练好了,Actor 留到 Online 阶段才动。
DP#
https://cheng-chi.github.io/ ↗
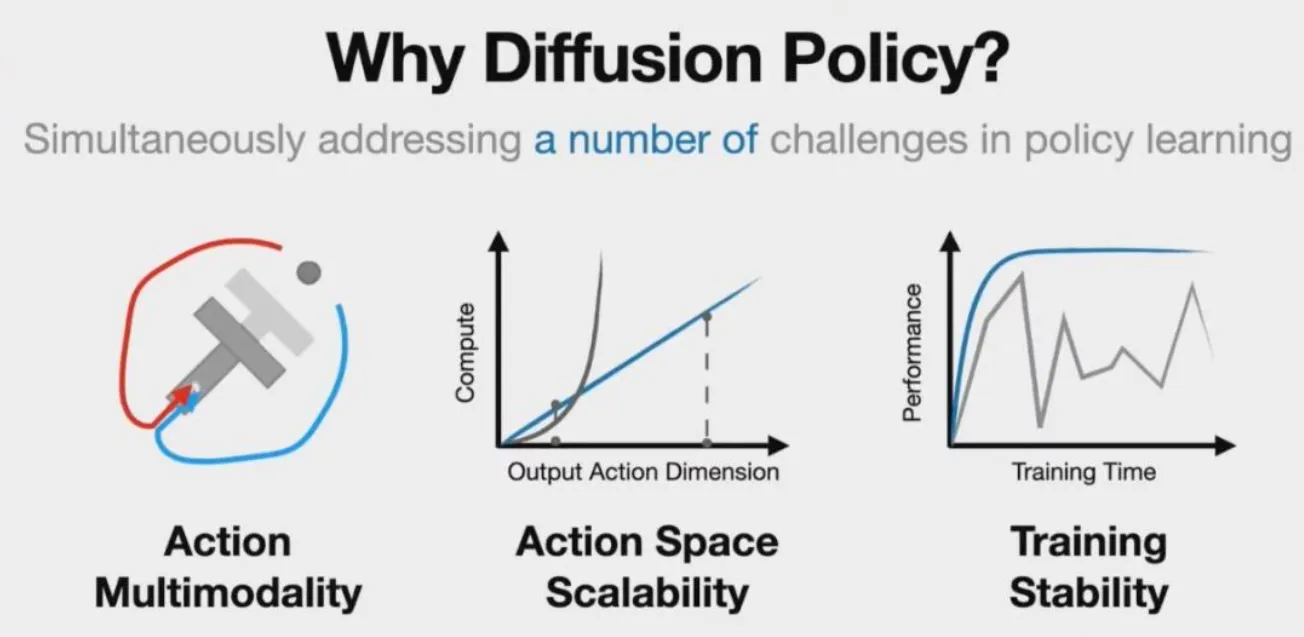
同样是建模概率分布,Diffusion Policy从数学理论上有连续性的优势,这是softmax做不到的,只要深刻理解了Diffusion的数学原理,其为什么可以解决Action Mulyimodality, Action Space Salability以及拥有 Train Stability是显而易见的。
DP3 ↗#
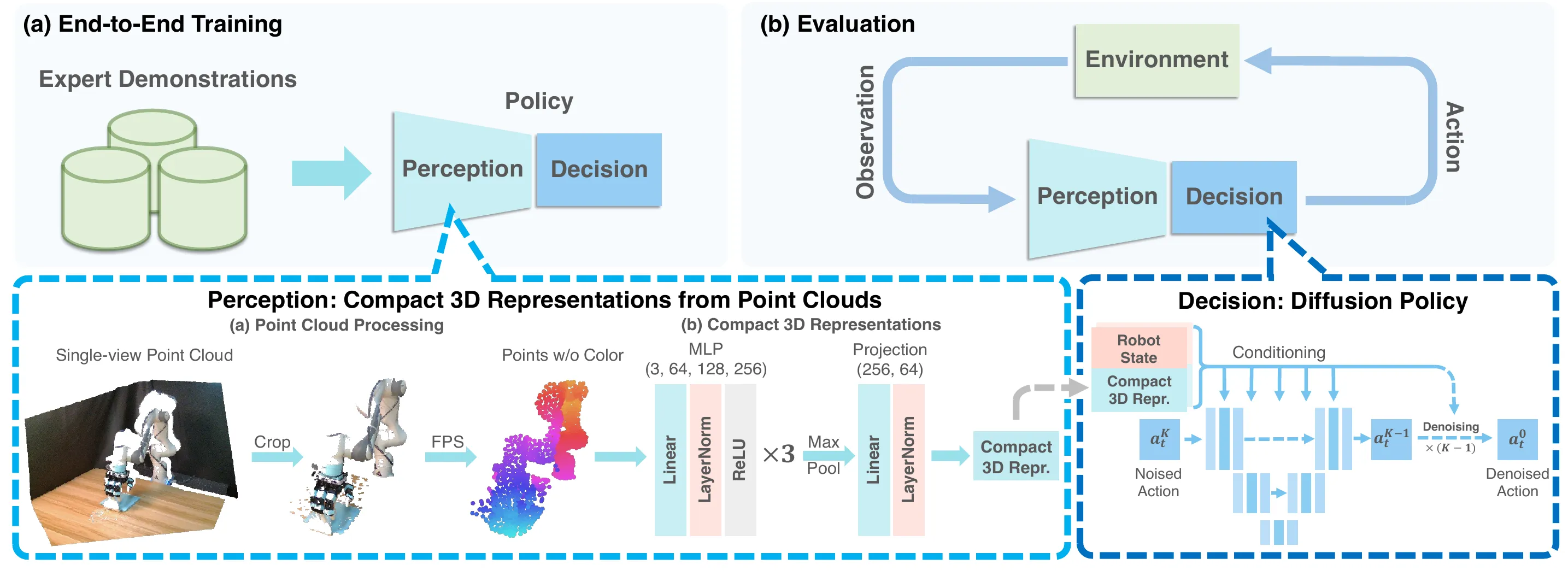
主要是参考它点云的处理方法,很干净的baseline。
-
输入 (Input) :单视角深度图(Depth Image)+ 机器人本体感知(关节角度等)。
-
点云处理 (Perception - Preprocessing) :
- 深度图转点云 -> 裁剪(Cropping)去除背景 -> 最远点采样 (FPS) 下采样到 512 或 1024 个点 。
- 关键点:通常不使用颜色信息(XYZ only),以提高对颜色变化的泛化能力 。
-
3D 编码 (Perception - Encoder) :
- DP3 Encoder:一个轻量级的 MLP 网络(PointNet的简化版,去掉了T-Net)。
- 结构:
MLP(3->64->128->256) ->MaxPool (提取全局特征) ->Projection(256->64)。 - 输出:一个紧凑的 64维 特征向量 。
-
决策生成 (Decision - Diffusion Backbone) :
- 采用 CNN-based Diffusion Policy(基于1D ResNet)。
- 条件 (Conditioning) :将 3D特征向量 和 机器人状态向量 拼接,作为 Condition 输入给去噪网络。
- 去噪 (Denoising) :从高斯噪声开始,经过 步迭代,生成未来的动作序列 。
-
输出 (Output) :执行动作序列(通常预测 步,执行前 步)。
ACT及其后续#
ACT#
ACT是ALOHA团队在2023年4月份提出的一种模仿学习算法,针对精细操作任务表现十分优异。
ACT后续已作为baseline算法在多篇论文,如RoboAgent,BridgeData V2中被引用。
在收集到的示教数据中,分别包含:4个视角的图像(480*640),从动臂的关节角((6DOF臂+1DOF夹爪)*2)和主动臂的关节角((6DOF臂+1DOF夹爪)*2)。
在训练过程中,从动臂的关节角和图像一起组成的输入给模型的观测值,而主动臂的关节角则作为了动作标签。
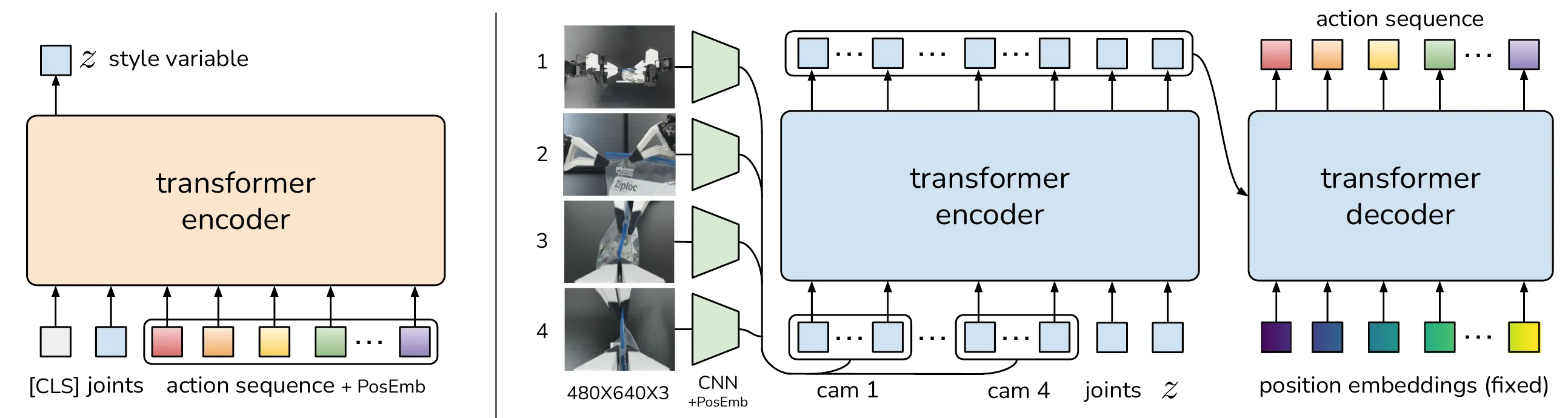
为了减小compounding error,ACT使用了action chunking。Action chunking是神经科学中的一个概念:独立的动作会被组合到一起并作为一个单元被执行,这样会使得动作被存储和执行的效率更高。我们甚至可以把将电池插入凹槽里这个任务视作一个action chunk。但是在ACT算法中,作者一开始将chunk size设置为固定的k步。每k步,agent获取一次输入,预测后k步的动作,然后按照顺序执行这些动作。这样做,可以直接将任务轨迹的长度缩短到1/k(只需要做1/k次预测)。
Chunking也可以帮助刻画人类示教行为的非马尔可夫性(人会根据历史信息来完成任务)。一个单步预测的策略很容易受到时序相关信息的影响,比如示教过程中的一个突然停顿,会让agent很困扰,因为下一步做什么动作会与停顿的时间有很强的关系。然而,简单的action chunking会出现这样的问题:每k步突然输入一个新的观测值,这种不连续会导致机器人出现不稳定的行为。为了使机器人的运动轨迹更加平滑,作者提出每一步都让模型预测后面k步的动作,这样会使得模型在不同时间点上预测的动作有所重合。进一步地,作者提出一种temporal ensemble的方法来组合这些预测值。
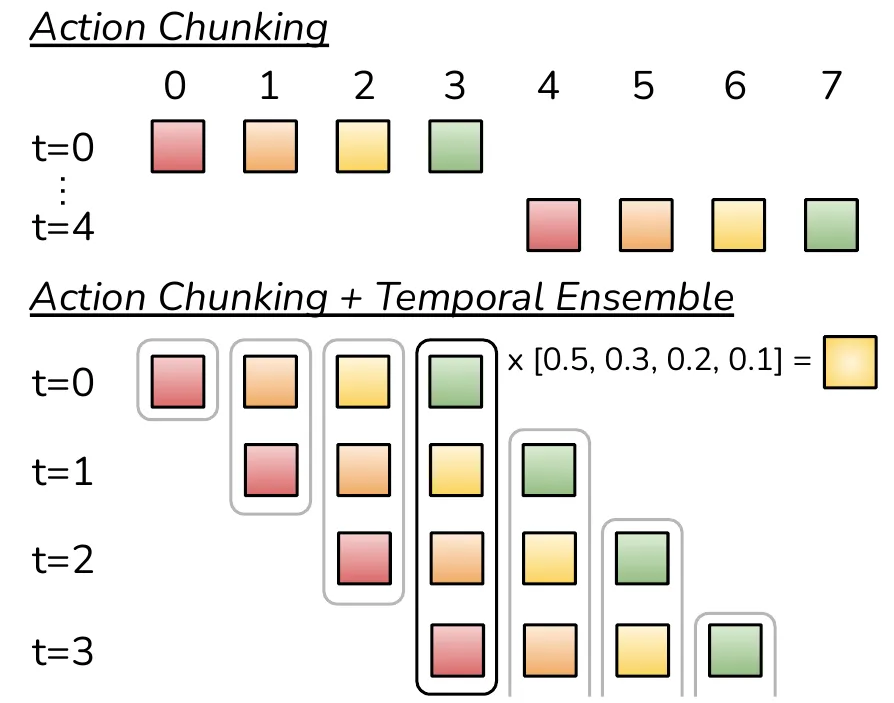
对于当前时间步 ,机器人最终执行的动作 是过去不同时刻对该时间点预测值的加权平均:。权重 采用指数加权(Exponential Weighting)方案:。Loss是标准BC Loss + VAE Loss。
在RoboTwin中,我发现ACT单任务微调成功率大于。
MT-ACT#
RoboAgent: RoboAgent IO界面 ↗
RoboSet数据集学术界友好:RoboSet ↗ 7500条高质量人类遥操作轨迹的数据集,技能多样性(12种技能,包括接触丰富任务)场景变化上高质量,Franka Panda通用硬件。
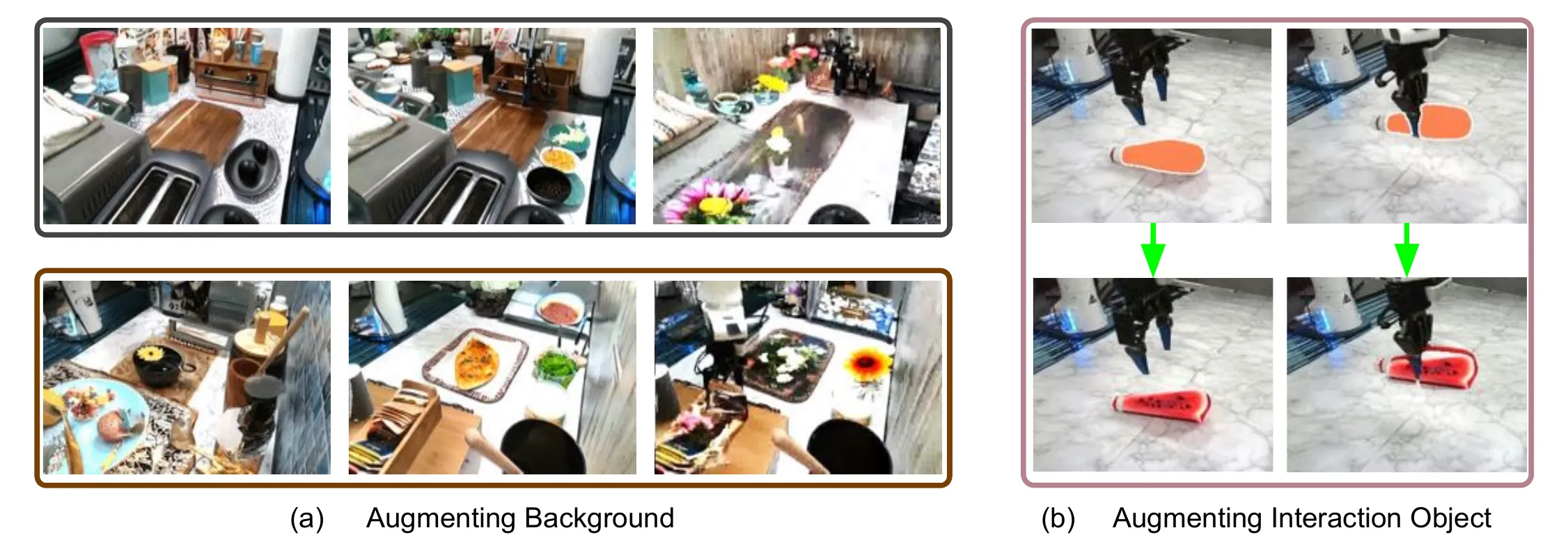
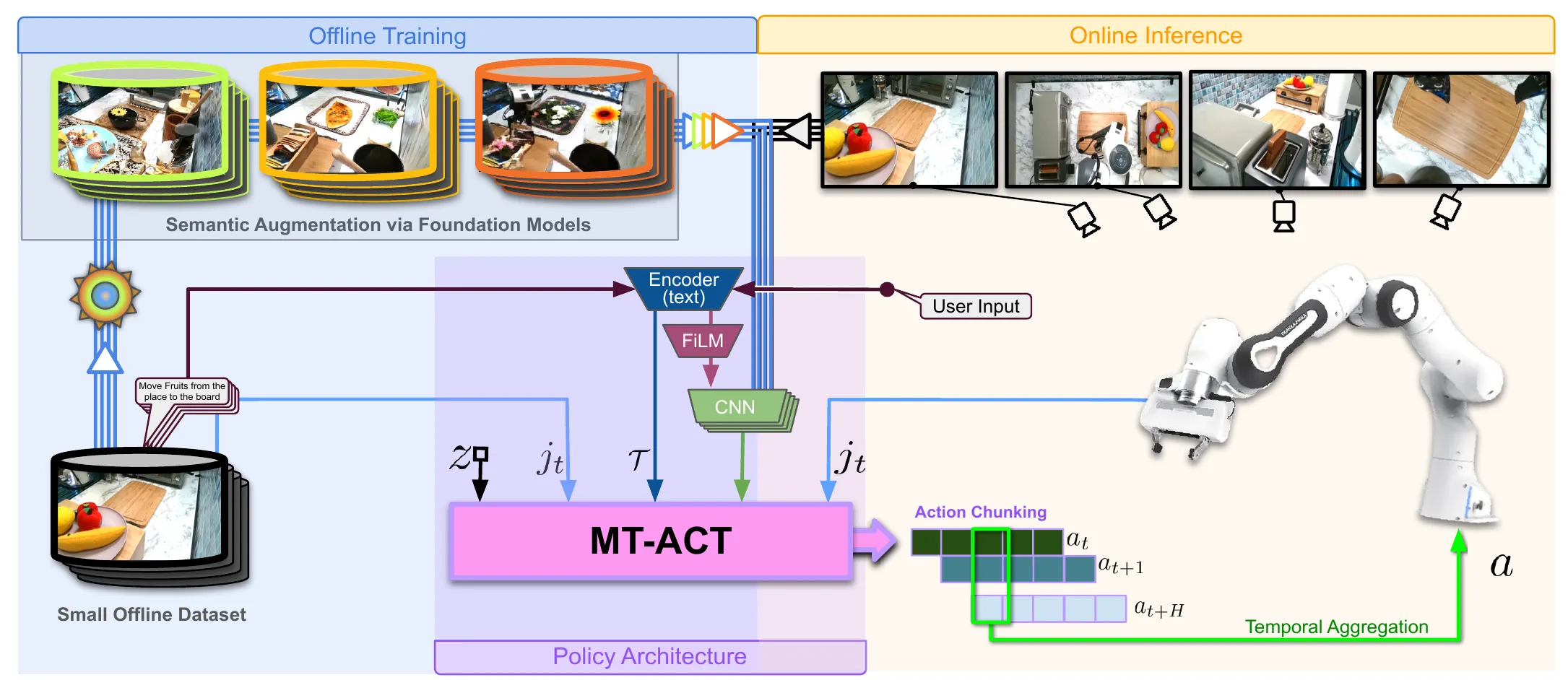
使ACT适应多任务 (Multi-task) 和语言条件 (Language-conditioned) 的场景,并引入了语义增强。利用生成式 AI(Foundation Models)将互联网数据的语义先验“蒸馏”到机器人数据中,从而以低成本实现泛化。
-
数据收集与增强 (Offline) :
- 收集少量高质量遥操作数据(RoboSet)。
- 语义增强:输入原始帧 -> 使用 SAM 分割对象 -> 使用文本提示指导生成式模型进行 Inpainting(重绘背景或物体) -> 输出多样化的增强帧。
-
策略训练 (MT-ACT) :
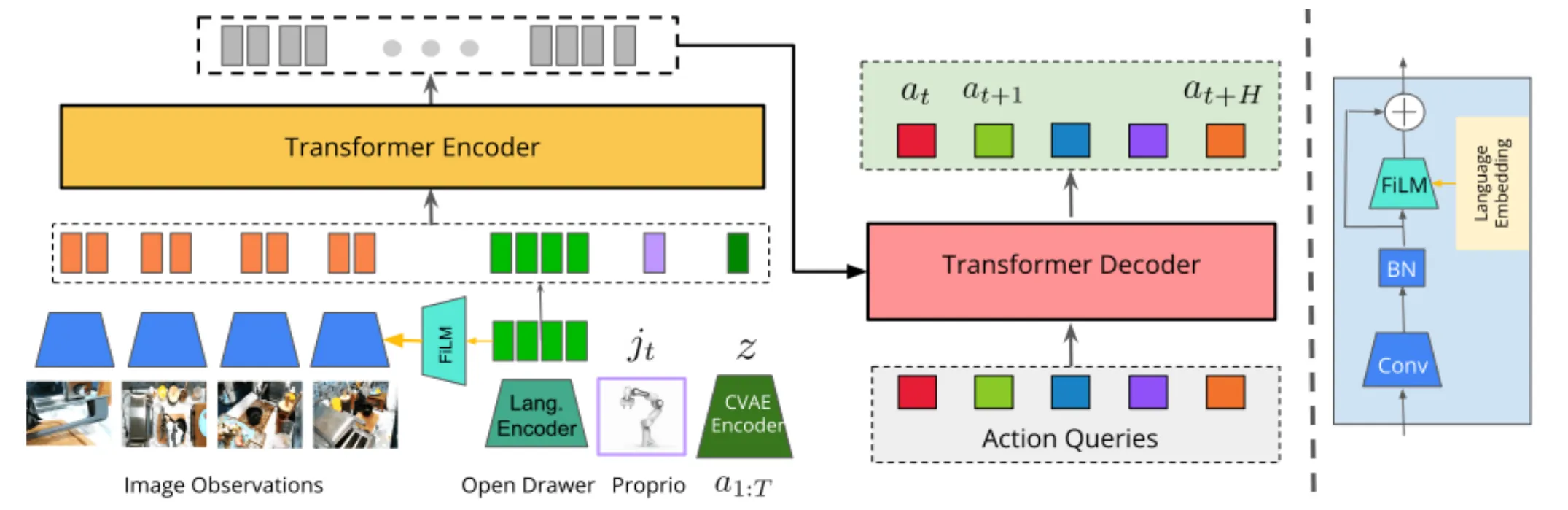
- 输入:多视角图像 (4个相机) + 机器人本体感知 + 语言指令 。
- 编码 (Encoder) :图像经过编码,语言指令通过预训练 Encoder 提取嵌入,并使用 FiLM 层将语言特征注入到图像特征中(这对于多任务区分至关重要)。
…(后面和标准ACT 一样)
Chunk size = 20 效果最好。
- 在 L1 泛化(光照、物体位置微调)下,MT-ACT 显著优于 RT-1, VIL, BeT 等基线。
- 在 L2/L3 泛化(新背景、新干扰物、新物体)下,引入语义增强的 MT-ACT 性能提升巨大(相对提升约 100%-400%)。去除了增强后,L2/L3 性能大幅下降,证明了生成式增强对 OOD(分布外)泛化的核心作用。
- L4 泛化(完全没见过的厨房):MT-ACT 达到 25% 成功率,而其他所有基线均为 0%。
nl-act#
nl-act开源代码 ↗ 工程实现与改进类工作
RoboAgent (MT-ACT) 使用了更复杂的FiLM (Feature-wise Linear Modulation) 层将语言嵌入注入到视觉骨干网络中 。本文采用了更简单直接的方法:直接将文本嵌入投影后拼接到Transformer Encoder的输入序列中。作者承认MT-ACT的方法可能更优,但本文证明了简单的拼接在模拟环境中依然有效。
-
输入指令 (Natural Language Instruction) SBERT Encoder (
all-mpnet-base-v2) 提取文本嵌入 (). -
投影与拼接 (Projection & Concatenation):
- (映射到 ) 。
- 构建输入序列 。
- 其中 是VAE的Latent, 是ResNet提取的图像特征, 是关节位置。
-
Transformer Encoder: 处理拼接后的序列,结合位置编码(Visual, Joint, Text)。
-
Transformer Decoder: 生成动作序列 (Action Sequence)。
- 简单的Concat机制:不同于RT-1或MT-ACT在视觉层做融合,这里直接在Decision Transformer层级做Token融合。
- 冻结的语言编码器:使用预训练好的SBERT模型,不进行微调,只训练投影层。
-
Semantic Data Augmentation:
- 利用 GPT-4o 为每个基础任务生成了35种不同的指令变体(Paraphrased instructions) 。
- 训练时采用随机指令采样 (Random Instruction Sampling) ,从25个训练指令中随机选择,保留10个作为验证。这迫使模型学习语义而非死记硬背特定的句法模式 。
-
Analysis of Noise Injection:
- 对比了在数据采集阶段注入轨迹噪声(Uniform noise [-0.01, 0.01])与无噪声数据的训练效果。
- Insight:发现噪声注入虽然没有提高最终的收敛上限(甚至略低),但显著加速了早期的学习速度(在10k迭代时,有噪声模型成功率85.3% vs 无噪声43.3%) 。这表明噪声通过暴露更多样化的状态空间,充当了类似“探索(Exploration)”的催化剂。
ACT-1#
Sunday Robotics发布的“ACT-1”作为商业公司的基础模型,是闭源的(只有演示视频,无公开权重或代码)。 ↗
ACT (Action Chunking Transformer) 和 UMI 的工程化放大版。
- Sunday Robotics 是一家由 Tony Zhao (CTO/Co-founder) 和 Cheng Chi 创立的具身智能初创公司。
- 创始人背景: Tony Zhao 是斯坦福博士生(导师Chelsea Finn),也是 Mobile ALOHA 和 ACT 算法的一作;Cheng Chi 是 UMI (Universal Manipulation Interface) 的一作。
- 产品: 视频中的机器人叫 Memo,而非人形,采用轮式底座+升降脊柱设计。