RL03-OfflineRL
Data Driven RL
Can we develop data-driven RL methods?
–Sergey Levine
RL 之所以没能像 CV 或 NLP 那样具有通用的泛化能力,是因为 RL 没能利用好“大数据”。传统的 RL 丢弃数据太快了,而监督学习则是建立在海量历史数据之上的。现代 AI 的成功 = 大数据 + 大模型。解决方案:Data-Driven RL(即 Offline RL)。
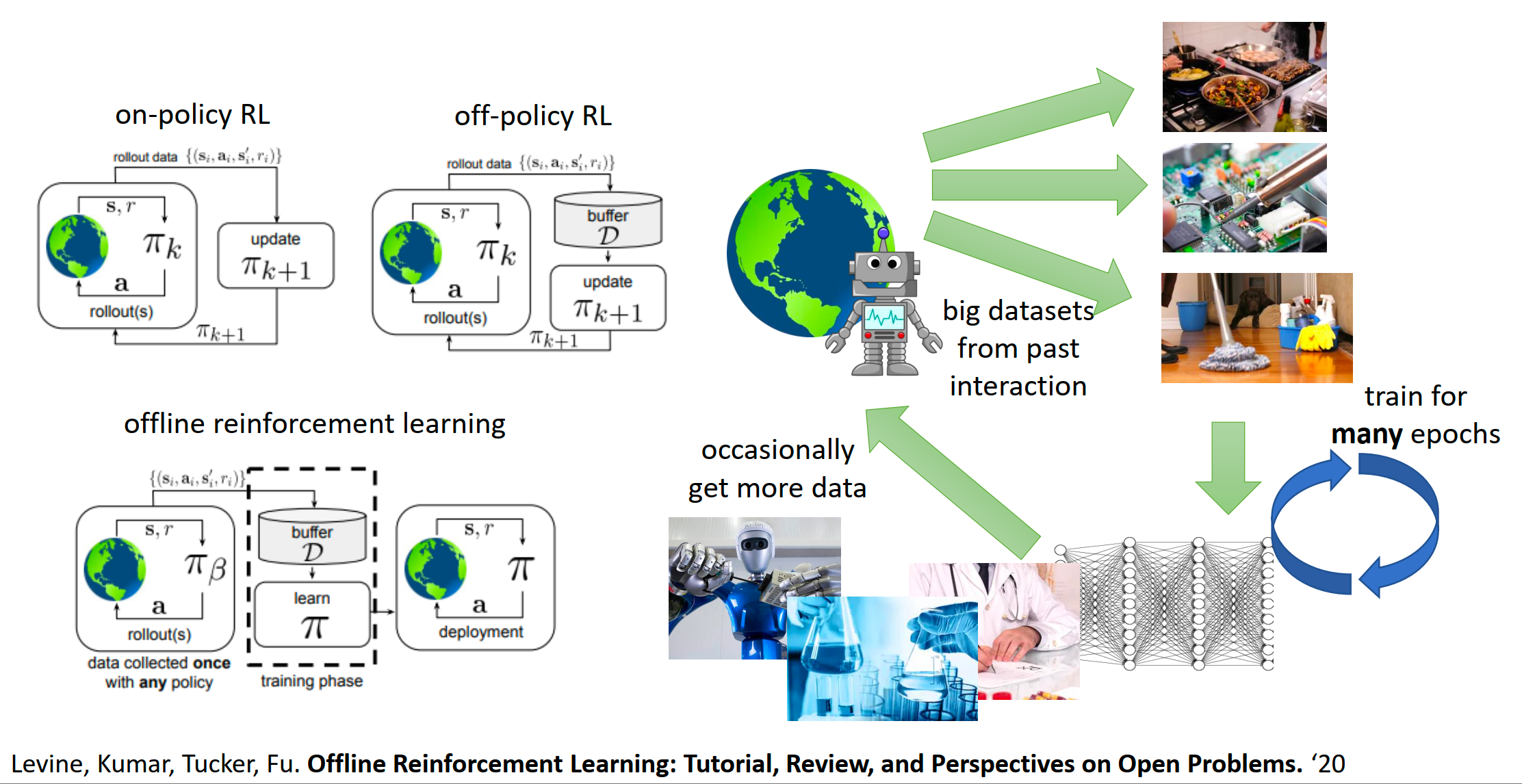
- On-policy RL(左上):最原始的方式。采一点数据,学一点,然后扔掉数据。效率极低。
- Off-policy RL(右上):有个 Buffer(缓存),可以利用稍旧的数据,但仍然需要不断与环境交互来补充新数据。
Offline Reinforcement Learning:
- Data collected once:数据是一次性收集好的(或利用历史遗留数据)。
- Training phase:训练过程完全与环境断开(虚线框内)。在这个阶段,可以像训练 GPT 或 ResNet 一样,在固定的数据集上跑很多个 Epoch。
- Deployment:训练好了直接部署,或者产生更多Data形成数据飞轮。
Formally:
RL objective:
在离线的设定下,我们通常想要解决两个层面的问题:
- Off-policy Evaluation (OPE, 离线策略评估)
定义:给定数据集 和一个指定的目标策略 ,请你估算一下:如果我真的去跑这个策略 ,它能得多少分()?
- Offline Reinforcement Learning (a.k.a. Batch RL)
定义:给定数据集 ,请你学习出一个最佳的策略 。
“not necessarily obvious what this means”

Offline RL 与行为克隆的关键区别:面对次优数据集,我们的目标是恢复出潜在的最优解,不是仅仅模仿数据分布中的相对最佳行为。
“Bad intuition: it’s like imitation learning” 。 之所以说这是 Bad intuition,是因为如果不引入 RL 的时序差分(Temporal Difference) 机制,你永远只能是数据的“复读机”。引入了价值函数(Q-function)和动态规划(Dynamic Programming),面对数据时学习的是物理规律与因果关系。
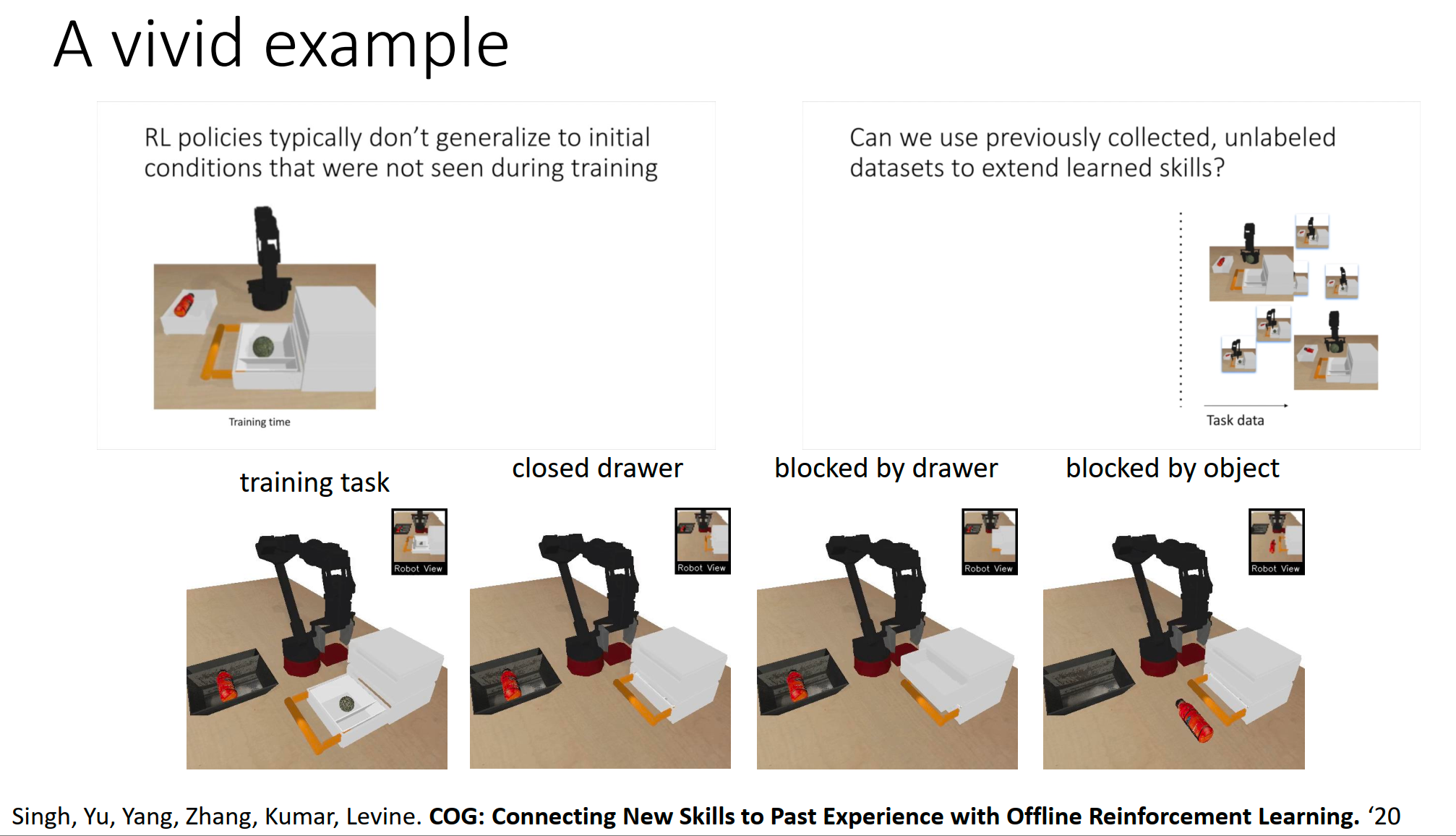
在数据质量受限的情况下,Offline RL 能实现超越行为策略的策略提升 (policy improvement),不是仅仅局限于在次优轨迹中寻找局部最优。
“How is this even possible?”
- Find the “good stuff” 从好坏参半的数据中挑出好的部分
- Generalization
- “Stitching” 如何将路径 A(从起点到中间)和路径 B(从中间到终点)结合起来,形成一条数据集中原本不存在的最优路径。
引用了 Kumar 等人的论文 “Should I Run Offline Reinforcement Learning or Behavioral Cloning?”
QT-Opt(Q-function Target Optimization),这是 Sergey Levine 团队(Google Research)在 2018 年发表的一个里程碑式工作。
“数据驱动的 RL 到底行不行?”。QT-Opt 用大规模的真机实验给出了肯定的回答:行,而且效果非常惊人。
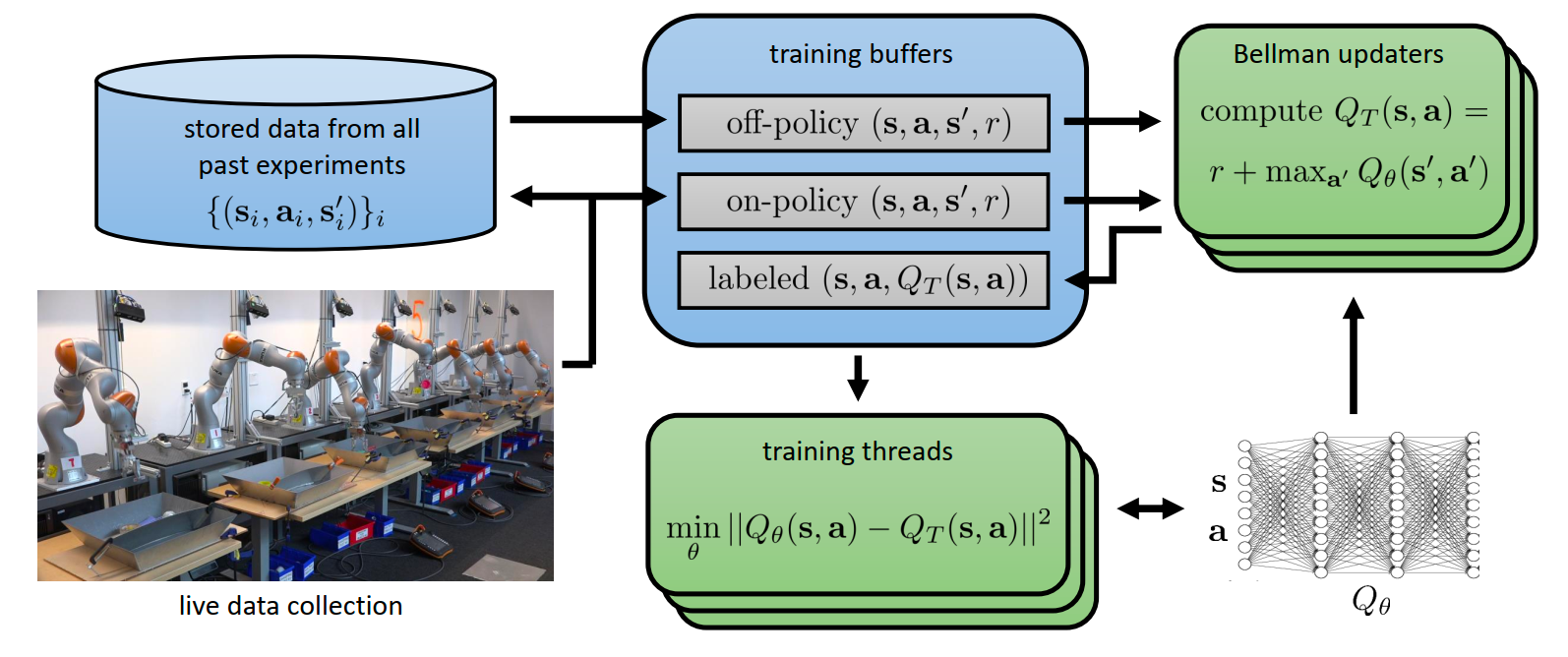
- Off-policy(旧策略产生的数据)和 On-policy(当前策略产生的数据)混合在一起放入 Buffer。
- Bellman updaters:大量的计算节点并在后台不断计算 Q 值的目标值(Target Value),即 。
- Training threads:利用深度神经网络(大模型)来拟合这些 Q 值 。

“离线预训练 + 在线微调” 流程的威力。
为什么我们不能直接把现有的 RL 算法(如 DQN 或 SAC)用到离线数据上
分布偏移 (Distribution Shift) 和 反事实查询 (Counterfactual Queries)
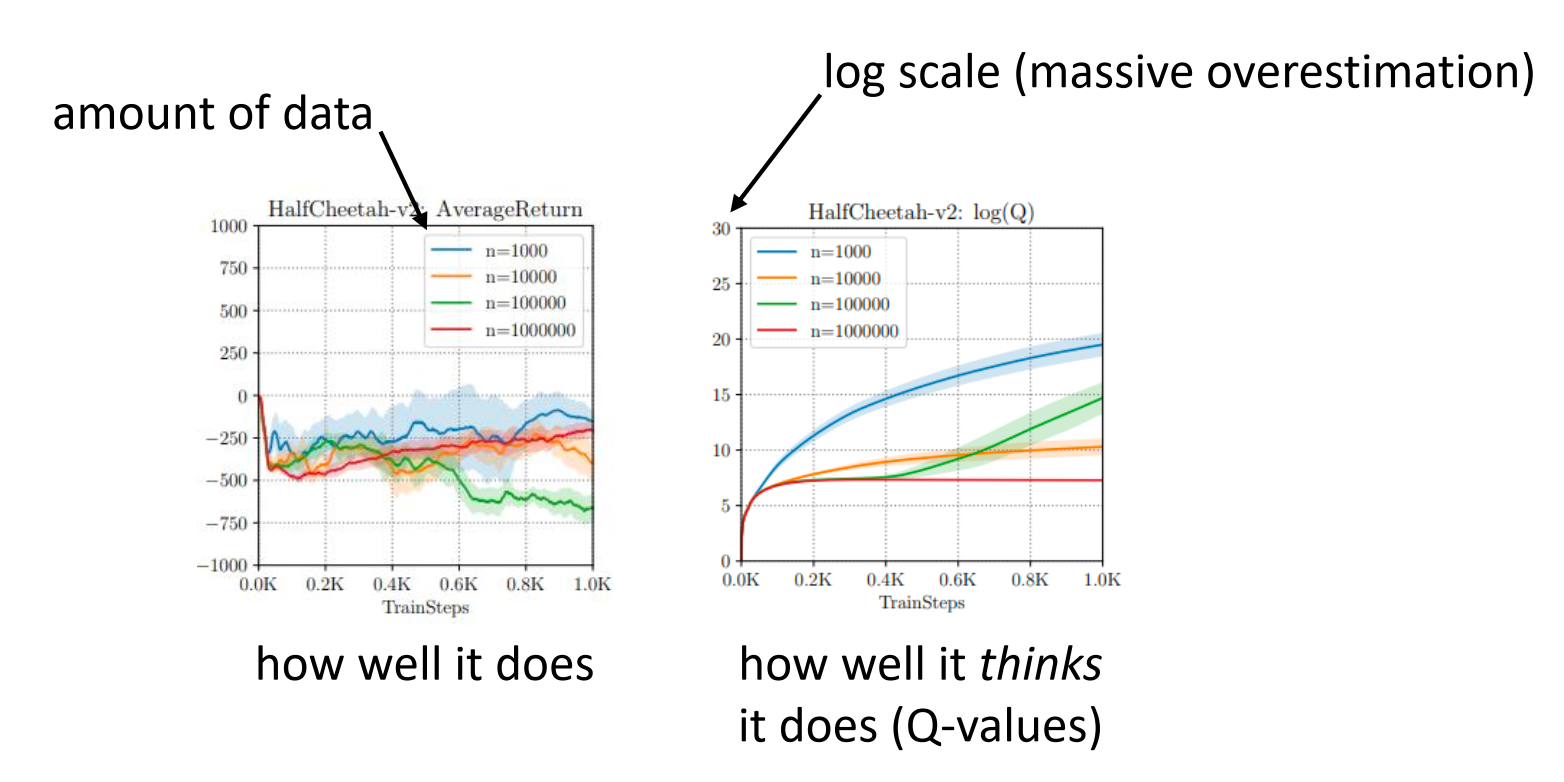
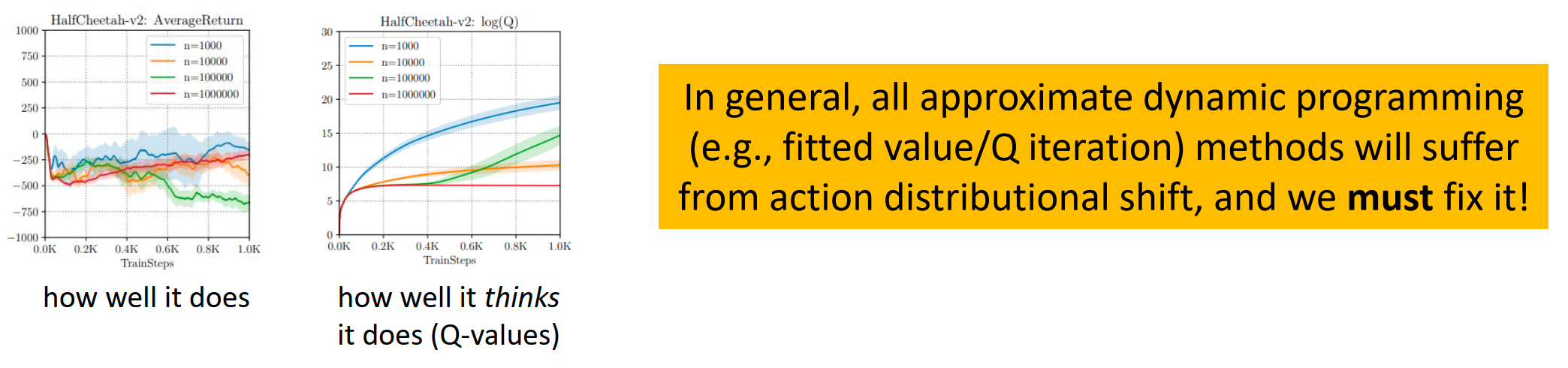
Kumar, Fu, Tucker, Levine. Stabilizing Off-Policy Q-Learning via Bootstrapping Error Reduction. NeurIPS ‘19
- 左图(实际表现) :随着训练步数增加(x轴),策略的实际回报(Average Return)不仅没有上升,反而暴跌到 -500 甚至更低。
- 右图(自我感觉) :注意看 y 轴是对数坐标 (log scale) 。智能体对自己 Q 值的估计(Q-values)竟然在指数级爆炸,它觉得自己能拿 分!
智能体在离线训练中患上了严重的“妄想症”。
反事实查询——问了一个数据中没有答案的问题,自动驾驶的例子在 RL01-BC-AIL-ModelBased 已经谈过。
- 监督学习 (ERM) :我们的目标是最小化误差。只要测试数据和训练数据分布一致(),神经网络就能泛化得很好。
- 强化学习:我们的目标不仅仅是拟合,更是最大化()。
- 陷阱:当你去寻找一个函数 的最大值点 时,你很大概率会找到一个**函数误差刚好为正(高估)**的地方,而且这个地方往往在训练数据分布之外(OOD)。
- 。
- 目标值 (Target Value) 的计算依赖于 。这个 是由当前策略 选择的,目的是为了让 Q 值最大。
- 恶性循环:如果 选了一个数据中没见过的动作(OOD Action),且 Q 函数恰好在这个动作上给出了错误的高分(高估),那么这个错误就会被当作“真实目标”更新到 Q 网络里。经过多次迭代,这种高估误差会像滚雪球一样爆炸。
-
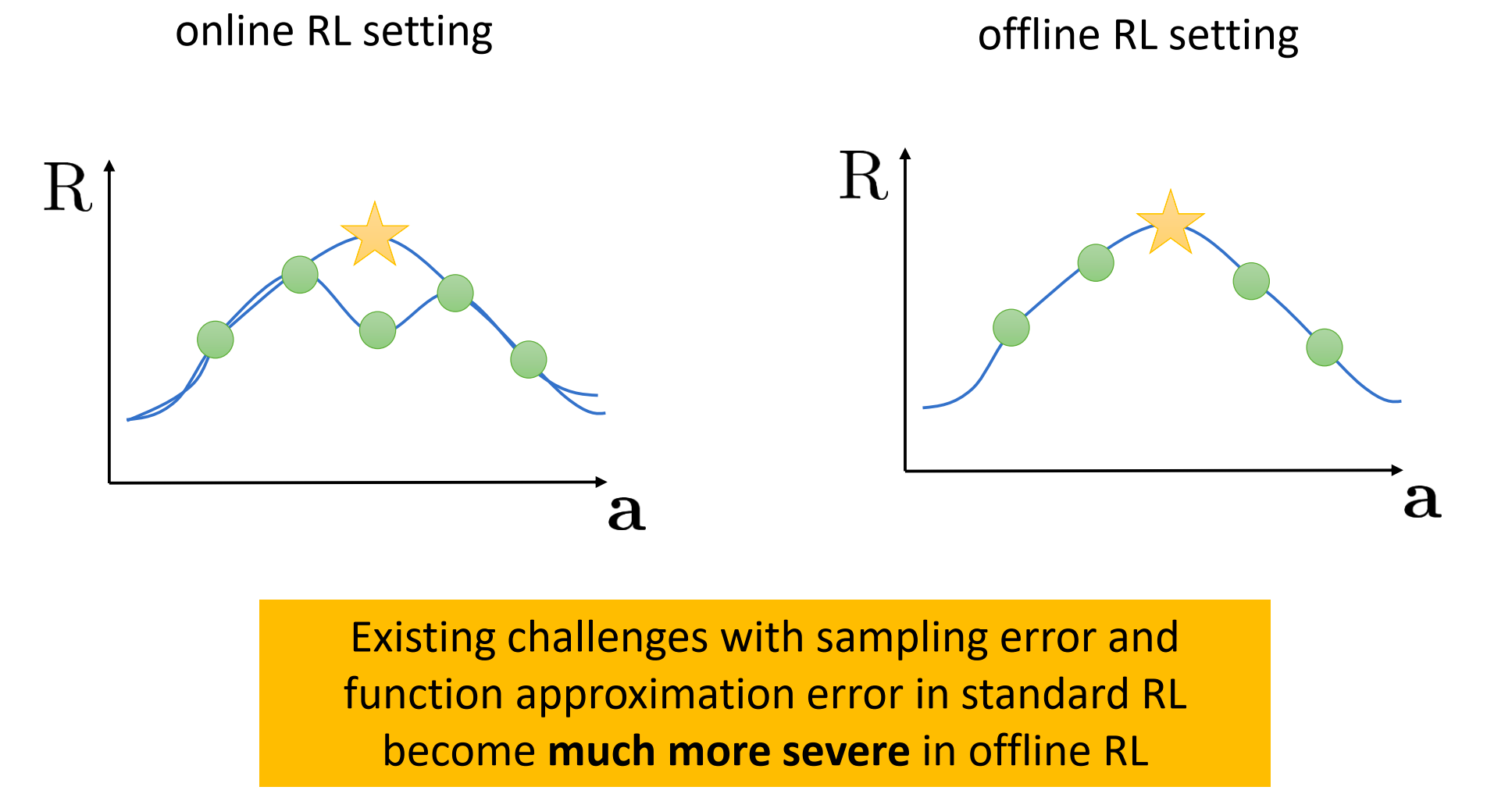
Online RL Setting(左图) :
- 如果我们高估了一个动作(黄色星星),策略会去执行它。执行后发现没那么好,收集到新数据(绿色点),把曲线压下来。这是一个自我修正的过程。
-
Offline RL Setting(右图) :
- 我们面对的是静态数据。如果函数近似(Function Approximation)导致在无人区(数据点之间的空白处)出现了一个虚假的高峰(黄色星星),算法会以为那是“金矿”。
- 死局:由于无法收集新数据来验证,这个虚假的高峰会一直存在,策略就会死死地卡在这个错误的动作上。
被劝退的早期方法:Importance Sampling and Linear Fitted Value Functions
IS
- 标准的 RL 目标函数是 。计算梯度时,我们需要从当前策略 中采样轨迹。
- Offline 困境:我们只有从行为策略 采样的轨迹。
其中 就是重要性权重 (Importance Weight) 。它的物理含义是:这条轨迹在当前新策略下发生的概率,除以它在老策略下发生的概率 。
一条轨迹的概率包含了“环境动力学” 和“策略” 。当我们计算比率时,环境动力学部分抵消了(因为环境物理规律不变),只剩下策略的比率乘积:
随着时间步 变长,重要性权重会要么爆炸,要么消失。这会导致梯度的方差(Variance)无穷大,使得算法根本无法收敛。
补救尝试 A:双重稳健估计 (Doubly Robust Estimator)
-
-
原理:
- 是一个估计的基线(Function Approximator)。
- 如果 估计得很准,后面括号里的误差项就很小,方差就小。
- 即使 估计不准(有偏差),只要重要性权重 是对的,整体估计依然是无偏的(Unbiased)。
-
递归下去依然会产生
连乘项 并没有消失,它只是因为公式写成了递归(嵌套)的形式而被折叠起来了,依然指数爆炸。
补救尝试 B:边缘化重要性采样 (Marginalized IS)
我们其实只需要知道状态-动作对 的分布比率 ,而不是整条轨迹的比率 。只要算出了这个 ,就可以直接加权求和计算目标函数:。
- 难点:如何求这个 ?
- 方法:这通常需要解一个不动点问题(Fixed point problem)或者由一致性条件(Consistency condition)推导出的优化问题(如 GenDICE 算法)。
一致性条件:
即我们求出的权重 必须符合环境的转移物理规律。
不动点问题:我们在找一个函数 ,使得 。
- 最小化残差:训练一个神经网络去拟合 ,让等式左边和右边的差距(Residual)最小化。
- GenDICE 算法:课件中提到的 Zhang et al., GenDICE 就是这类算法的代表。
现状:这种方法主要用于 OPE(离线策略评估) ,在策略学习(Policy Learning)中虽然有应用,但在深度强化学习的大规模实践中不如 CQL/IQL 等方法主流 。还是因为极大极小优化难以调参/保证收敛。
Linear Value
为什么要讲这个?
- 历史回顾:这些是经典的 Batch RL 方法(如 LSTD, LSPI),虽然现在深度学习(Deep RL)是主流,但理解它们的原理有助于理解 RL 的本质。
- 为了证明问题:Sergey Levine 想通过这些简单模型说明,即使在最简单、最不容易过拟合的线性模型中,分布偏移(Distribution Shift)的问题依然存在。
-
设定:
- 我们不再使用深层神经网络,而是使用线性模型。
- 状态 被映射为一个特征向量 (维度为 )。
- 整个状态空间被表示为一个特征矩阵 (大小 )。
-
线性近似:
- 奖励函数近似为:
- 转移矩阵近似为:
- 价值函数近似为:
-
优点:所有东西都有闭式解(Closed-form solution),可以直接用最小二乘法(Least Squares)算出来,不需要梯度下降。
于是带入Bellman方程我们有LSTD (Least-Squares Temporal Difference) 公式:
但是Value是与策略绑定的,导致offline不可行,这个问题在RL02-Actor-Critic-Value-Method-and-Q 已经讨论的很清楚了。所以还是得靠Q值来构建策略。
虽然 LSPI 在数学上跑通了,但实验结果(HalfCheetah)显示它依然崩溃了。
-
现象:曲线图显示,随着训练进行,Q 值(右图)依然在爆炸,实际回报(左图)依然很差。
-
原因:
尽管是线性模型,LSPI 依然涉及到了:
只要有这个 Max 操作,就会去查询那些数据中没见过的、甚至不合理的动作(OOD Actions)。如果线性模型的泛化在某些方向上出错了(高估),Max 操作依然会抓住这个错误不放,导致价值函数崩溃。
Explicit Policy Constraint
Offline RL 分布偏移问题的早期主流方法:显式策略约束 (Explicit Policy Constraint) 。
核心思想是:既然我们不知道分布外(OOD)的 Q 值准不准,那我们就强迫我们学到的策略 不要偏离 产生数据的行为策略 太远。
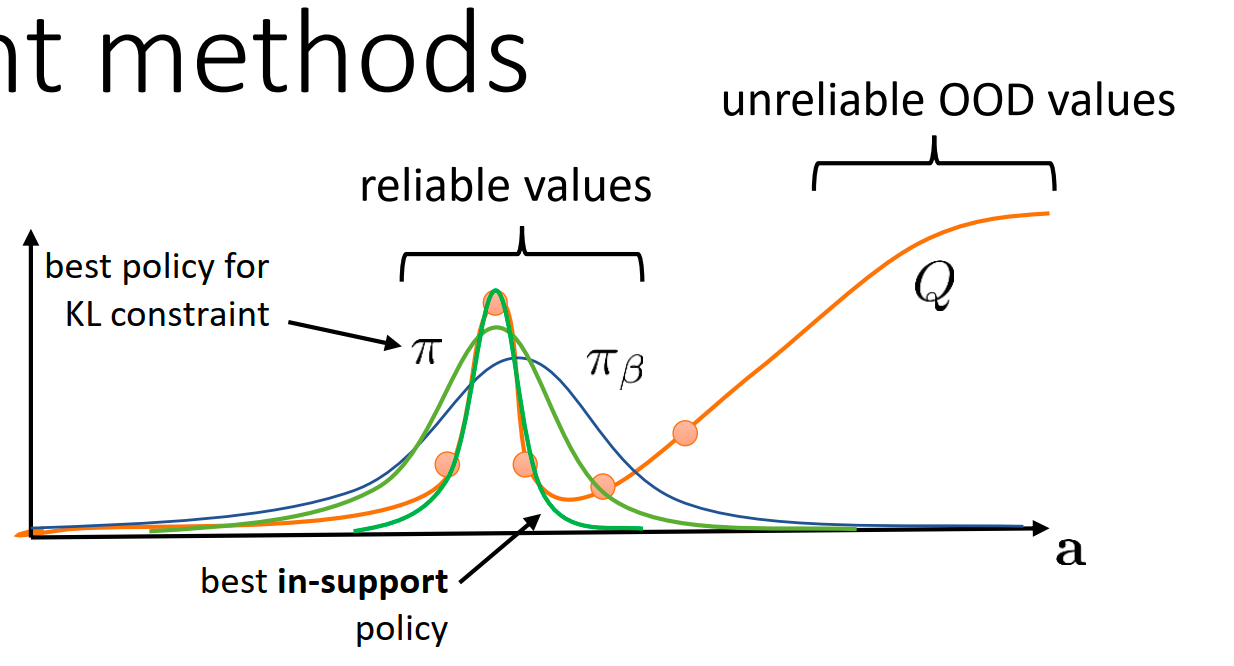
有关约束策略:
KL 散度 (KL-divergence):
- Easy to implement
- Not necessarily what we want:KL 散度要求两个分布的形状相似。但在 Offline RL 中,我们其实只希望 在 有数据的区域(Support)内活动,至于在这个区域内 是否一定要像 ,其实不重要。反而我们希望可以超越 找到更好的行为。
支撑集约束 (Support Constraint) : only if
“Much closer to what we really want”我们希望在有数据的区域内自由寻找最优解。
Significantly more complex to implement 需要用到 MMD(最大均值差异)等复杂的度量。
How do we implement constraints?
修改 Actor 的目标函数 (Modify the actor objective)
或者直接把惩罚项加到奖励里:

显式地去估计 (通常用 behavior cloning)并强制约束,往往效果不如后续介绍的隐式约束(AWR/IQL)或价值约束(CQL)。这是因为估计 本身就很困难,估计不准会导致约束失效或过强。
Implicit Policy Constraint
设定一个约束优化问题如下:
这个优化问题在数学上有一个著名的解析解(通过拉格朗日对偶性推导):
这告诉我们:最优策略其实就是把原来的行为策略 拿来,根据优势函数 **** (动作好不好)进行加权 。
巧妙转化:加权最大似然 (Weighted Max Likelihood) :
我们可以最小化 和 之间的距离(KL 散度)。经过推导,这等价于做一个加权的监督学习:
给好样本更高的权重,给差样本更低的权重,这就自动满足了 KL 约束。
典型代表是 AWR (Advantage-Weighted Regression) 和 AWAC (Accelerating Online RL with Offline Datasets)。
两步循环:
- Critic Update (学 Q 值) :
- Actor Update (学策略) :
因为它只在真实数据点上做梯度更新,所以极难产生严重的分布偏移(OOD)动作。
AWR (2019) 是 AWAC (2020) 的前身,且在具体的 Critic 实现细节上略有不同(例如 AWR 经常使用蒙特卡洛回归或 ,而 AWAC 明确使用 Off-policy Q-learning)。
IQL
Implicit Q-Learning (IQL) 。这是由 Sergey Levine 团队(Kostrikov et al., 2021)提出的一种极具影响力的现代 Offline RL 算法。它彻底改变了 Q-learning 的更新方式,使得我们可以在完全不查询分布外(OOD)动作的情况下,完成价值函数的更新。
标准Q更新必然涉及OOD:
-
为了计算目标值(Target),我们需要估算下一状态 的价值。在 Q-learning 中,这通常意味着取最大值 。
-
这个最大化操作(Max)会去查询策略 认为最好的动作。但这个动作很可能并不在数据集()里。一旦查询了未知动作,Q 值就可能高估爆炸。
如何避免OOD: 训练一个 去拟合
直觉角度思考
- 如果你用均方误差(MSE Loss)训练 ,你得到的是 Q 值的均值(Mean/Expectation) 。但这代表的是“平均水平”的策略,不是我们想要的“最优水平”。
- 我们想要的是 。
魔法:用“分位数回归”替代“最大化”
-
Expectile Regression (期望分位数回归):IQL 引入了一个非对称的损失函数 :
-
当误差 (即 )时,权重是 (0.9)。
-
当误差 (即 )时,权重是 (0.1)。
我们迫使 不去拟合 Q 的均值,而是去拟合 Q 分布的上分位数(Upper Expectile) 。
- 当 时,这个 就会无限逼近数据集内 Q 值的最大值 。
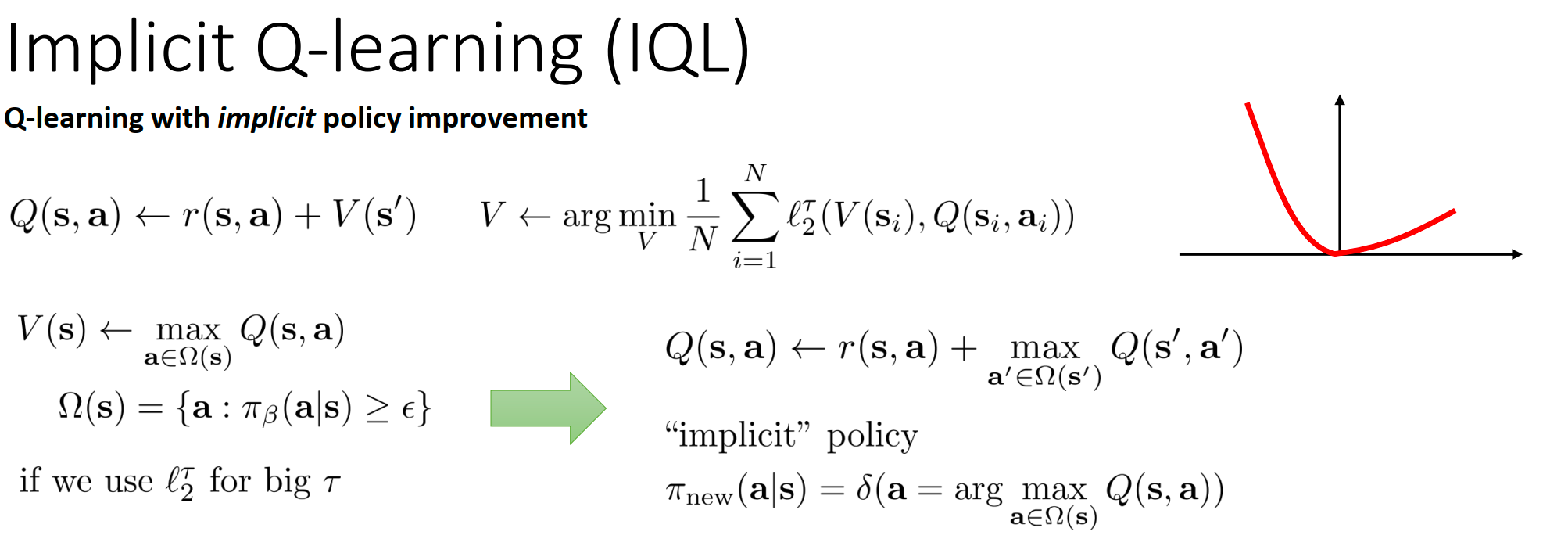
Pipeline:
-
Value Update Expectile Regression
-
Q Update 纯粹的监督回归,完全规避了 OOD 问题
-
Policy Update: 隐式策略定义为 。实际操作中,使用类似 AWR 的方式,通过优势函数 $A = Q - V$ 进行加权提取:
它极度稳定,且对超参数不敏感。
CQL
Conservative Q-Learning (CQL) ,这是 Sergey Levine 团队(Kumar et al., 2020)提出的另一个里程碑式算法。动机:治好“Q值妄想症”即高估。核心主义是“悲观主义”。
会拼命去寻找 Q 函数曲面上那些凸起的“尖峰” 。在离线 RL 中,这些尖峰往往对应着分布外(OOD)的错误高估点。
既然 已经把那些虚高的 Q 值找出来了(放在了 Loss 里), 网络为了降低 Loss,就必须把这些尖峰狠狠地压下去。
如果只是一味地压低(Minimize Q),Q 值可能会无限下降到负无穷,导致网络崩溃。为了解决这个问题,CQL 引入了一个“锚点”。
完整的 CQL 目标函数:
- 减号前:对于那些 Q 值虚高的 OOD 动作,我不停地压。
- 减号后:对于数据集里真实存在的动作(),我拼命地抬。
- 哪怕 Q 值整体偏低也没关系,只要真实动作的 Q 值 > OOD 动作的 Q 值,策略在做 Argmax 选择时,就会自动选到真实动作,从而保证安全。
在代码实现时,我们不需要真的去训练一个对抗网络 。
对于这个 问题,如果加上熵正则化,其最优解 有解析解:
将这个最优的 代回原公式,第一项(Push down)就变成了:
所以,CQL 的 Loss 在代码里非常简单(以离散动作为例):
Model Based Offline RL
Model-free 方法(如 CQL/IQL)是在“避开”或“压低”未知的危险,那么 Model-based 方法则是试图 “搞清楚到底哪里危险”。但是在环境模型中,如果策略试图访问OOD,高估幻觉依然成立。MOPO (Model-Based Offline Policy Optimization) 提出了一个非常直观的方案,即量化不确定性。
修正奖励:
- 如果模型对某个 很确定( 很小),那奖励保持不变。
- 如果模型对某个 很迷茫( 很大),那就给一个巨大的惩罚,强迫策略不要往那里走。
数学理论上,MOPO 保证,只要我们用修改后的奖励 来训练,学到的策略在真实环境中的回报下界是有保障的。它甚至量化了“最优性差距(Optimality Gap)”与模型误差之间的关系 。
MOPO 是单纯的 Model-based 方法,而 COMBO (Conservative Offline Model-Based Policy Optimization) 则试图融合 Model-based 和 Model-free(CQL)的优点。我们不需要显式地修改奖励函数,而是可以像 CQL 那样直接压低 Q 值。
- 在 CQL 中,我们压低的是策略 选择的动作的 Q 值。
- 在 COMBO 中,我们压低的是模型生成的模拟数据 的 Q 值 。如果模型生成了一个看起来很假、跟真实数据分布很不一样的状态动作对,Q 函数就会通过最小化操作把它压低,从而防止策略被模型的幻觉误导 。
Trajectory Transformer
模型:不再训练一步步的 ,而是用 Transformer 直接建模整条轨迹的联合概率
控制:在推断(Inference)时,使用 Beam Search。
-
不是找概率最大的轨迹,而是找累积奖励 最高的轨迹。
-
为什么有效? :
- Transformer 强大的表达能力可以记住复杂的分布。
- Beam Search 在生成高回报轨迹的同时,也会倾向于生成高概率(即符合数据分布) 的轨迹,从而自动避免了 OOD 动作 。
Beam Search (集束搜索) 是一种介于“贪婪搜索(只看眼前最好的一步)”和“穷举搜索(尝试所有可能的路径)”之间的折中方案:它在每一步不是只保留 1 个最好的选择,也不是保留所有选择,而是永远只保留当前最好的 个选择(这个 叫做 Beam Width) 。
Summary, Applications, Open Questions
| 应用场景 | 推荐算法 | 优点 (+) | 缺点 (-) |
|---|---|---|---|
| 仅离线训练 (Only train offline) |
Conservative Q-learning (CQL) | 1.只有一个超参数 () 2.理解透彻且经过广泛测试 3.非常稳健 |
成也“悲观”,败也“悲观” |
| Implicit Q-learning (IQL) | 1.更灵活(既能离线也能在线) |
1.超参数较多 |
|
| 离线训练 + 在线微调 (Offline pre-train + Online finetune) |
AWAC | 1.广泛使用且经过良好测试 |
- |
| Implicit Q-learning (IQL) | 1.性能似乎比 AWAC 更好! |
- | |
| 基于模型 (If you have a good model) |
COMBO | 1.具有类似 CQL 的保守属性,但能利用模型的优势 |
1.在特定领域训练好模型并不容易 |
| Trajectory Transformer | 1.极其强大且有效的模型 |
1.计算成本极高(训练和评估都很贵) |
Offline RL 的真正威力:它彻底改变了强化学习在现实世界中的工作流(Workflow)。
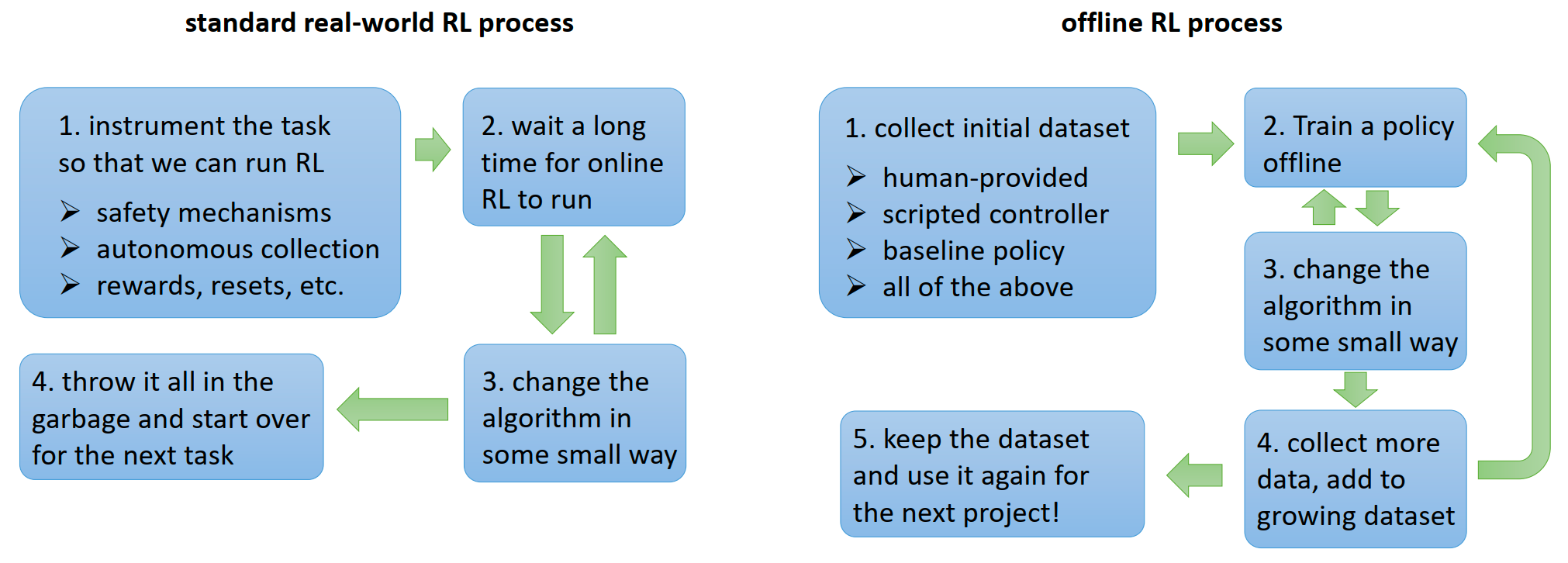
Offline RL 将强化学习从一种“一次性、昂贵的在线实验”,转变为了“可累积、可复用的数据资产管理”。
Offline RL 在大规模机器人操作(Robotic Manipulation)中的两个前沿应用案例:
MT-Opt:多任务离线强化学习
12 个不同的任务。我可以把所有机器人(Months of data collection) 产生的所有数据汇聚在一起,用同一个数据集训练所有的任务。
Goal Image:给机器人看一张“完成任务后”的照片(比如托盘里有胡萝卜的照片)。机器人通过对比当前图像和目标图像,学习如何行动以达成目标。
Actionable Models (AMs):无奖励离线强化学习
连“任务”都不定义,只是让机器人瞎玩,能学到东西吗?
-
完全无奖励 (No reward function at all) :
- 任务完全通过 Goal Image 来定义。比如给机器人看一张“盖子盖上了”的照片,让它去达成这个状态 。
-
算法核心:
- 使用了 基于 CQL 的保守离线 RL 方法,专门设计用于目标达成(Goal-reaching)任务 。
- 这再次验证了 CQL 在离线设定下的可靠性。
-
作为预训练目标 (Unsupervised Pretraining) :
- 第一步(离线) :利用海量的无标签历史数据,训练一个通用的“目标达成 Q 函数”(Actionable Model)。这时候机器人学会了各种物理交互逻辑(怎么推、怎么抓、怎么放)。
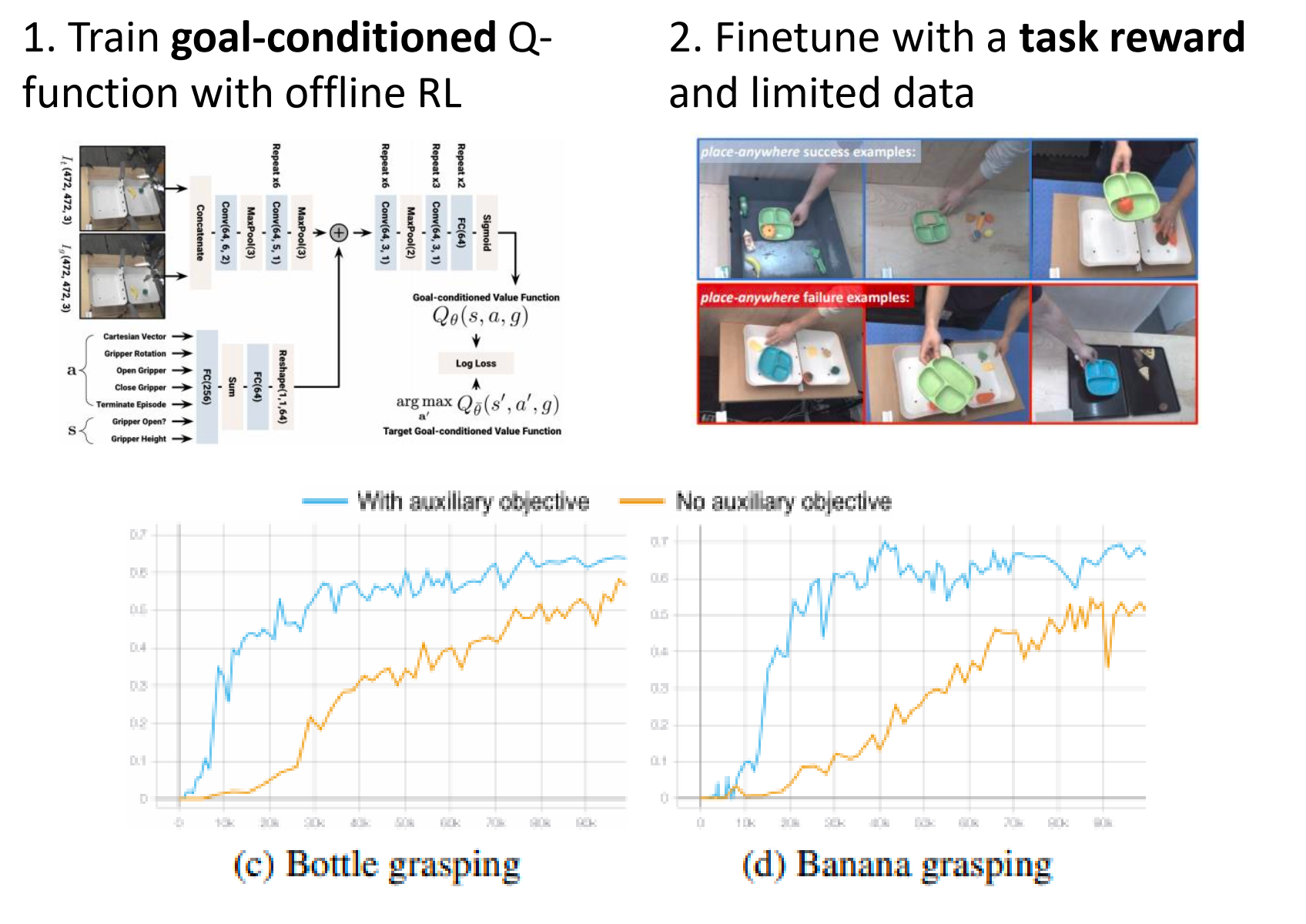
- 第二步(在线微调) :当我们需要机器人完成一个特定任务(比如“抓瓶子”)时,只需要定义少量的任务奖励,用极少的数据进行微调。"conventional reward-driven online reinforcement learning"标准的 QT-Opt 算法。
-
Another Option: Auxiliary Objective
总损失函数为 。
-
:这是标准的在线任务损失(无保守项)。
:这是 “regularized goal-reaching objective from Eq. 1” 。Eq. 1 正是包含了负样本采样(即 CQL 变体)的保守损失函数。

数据复用的极致案例:Badgr(40小时数据自监督导航) -> ViNG (直接复用数据完成目标条件导航系统)-> RECON(再次复用数据实现探索系统)
-
The Dream: 像监督学习一样简单:
- 随便找个策略收集一堆数据(Collect a dataset)。
- 在服务器上跑 Offline RL 算法(Run offline RL)。
- 直接部署到现实世界,并且能够完美运行(Deploy)。
-
The Gap (现实差距) :目前的算法虽然有了很大进步(如 CQL, IQL),但离这个“无脑使用”的梦想还有距离。我们还缺少像监督学习那样的标准工作流(Train/Test Split 在 RL 里怎么定义?)和统计保证(怎么保证部署后一定安全?)。
-
Future Directions (未来方向) :
- 工作流标准化:我们需要一套像
PyTorch/TensorFlow那样标准化的 Offline RL 开发流程。 - 可扩展性:将方法应用到更大规模的领域,如对话系统(Dialogue Systems)和自动驾驶(Data-driven navigation) 。
- 工作流标准化:我们需要一套像
Offline RL 是通向通用人工智能(General Purpose AI)的必经之路。 它让我们摆脱了对实时交互的依赖,使得机器人和 AI Agent 能够通过消化海量的历史数据,获得对物理世界的深刻理解和泛化能力。虽然还有很多挑战(分布偏移、评估困难),但方向已经非常明确了。