RL02-Actor-Critic-Value-Method-and-Q
这份笔记建立了从 Actor-Critic 到 Value-Based 方法 的理论桥梁,严谨地分析了深度强化学习面临的收敛性挑战(Deadly Triad)。它最终落脚于 连续控制机器人 的解决方案,详细阐述了 NAF 和 DDPG 如何解决连续动作空间下的最大化难题,以及 QT-Opt 架构如何将这些原理扩展到大规模分布式系统中。
ReCap Policy Gradient
假设你很熟悉这个表:
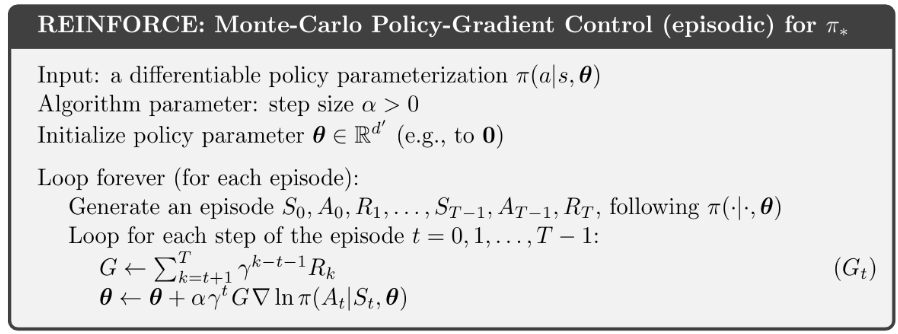
不仿把Loop forever替换为一个Batch N个episode,我们把两个循环合并可以得到一下公式:
这里最关键的一项是 ,为 “reward to go” (未来的累计回报) 。这里的 既可以是(有限视界任务),也可以是 (无限视界任务)。
目前我们讨论的 是基于采样的,它虽然是无偏估计,但是由于采样方法本身方差很大,会导致训练不稳定。尽管有加入baseline降低方差来稳定训练的方法,我们依然期待去使用一个上限更高且可以scale up的方法。
在完美理想的情况下我们期待的公式是这样的:

加入baseline之后的期望公式是这样的:
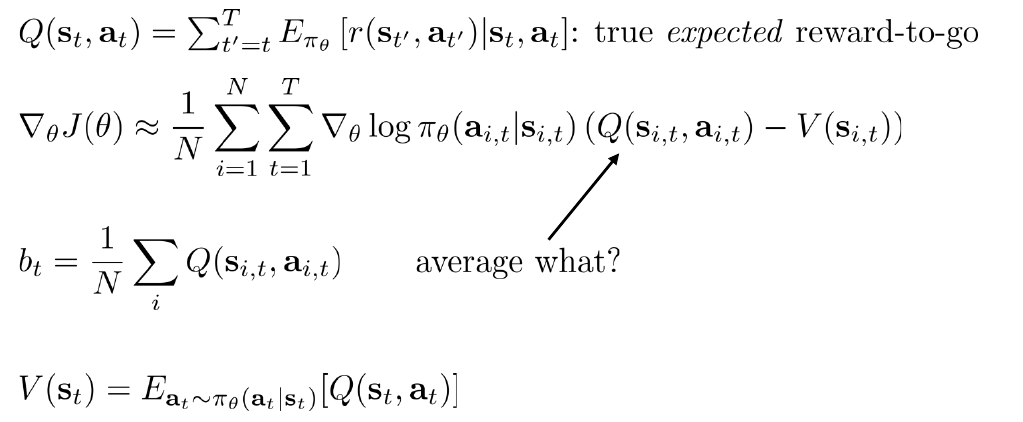
这里我们已经看到优势函数(Advantage Function) 的原型了,通过此次推导我直观的理解,优势函数就是REINFORCE w/ baseline加上数学期望所需要的一个关键元素。
一般教材将其解读为:如果 ,说明这个动作比平均好,应该鼓励;如果 ,说明这个动作比较差 。
但实际情况是我们无法直接获得true expected reward-to-go,期望降低了方差,但是注定无法无偏估计,只能去拟合。
Evaluation
我们需要估计 ,但我们手里只有采样的数据。我们应该训练哪种网络? ?
我们省略折扣因子列出Bellman方程:
再向前走一步:
是的只需要拟合,和都有了。
原始的蒙特卡洛(MC)评估 (Policy Evaluation)自然是不可行的,训练一个神经网络 ,这就是Critic 的雏形。然后标准监督学习回归(Supervised Regression)。
为什么有效? :虽然每一个标签 都是带有高方差的单次采样结果,但神经网络在训练过程中会试图去拟合这些嘈杂数据的平均值。这就变相实现了“在相似状态下取平均”的效果 。我个人的理解是神经网络的预测更加平滑,所以稳定了训练。
但是 标签 还是有很大的方差(因为它包含了未来无数步的随机性),所以我们从拟合MC转向拟合Bootstrapping (自举)。
新标签 (Target) :
From Evaluation to Actor Critic
Batch Actor-Critic 算法
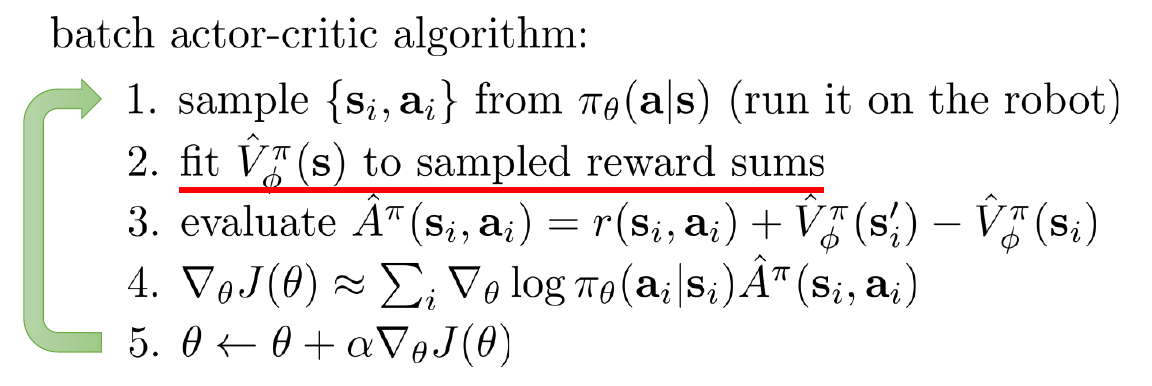
相比上一节,我们开始正式向Critic训练引入折扣因子。 ,。折扣因子0.99 works well。这里我们有另一个理解折扣因子的视角:
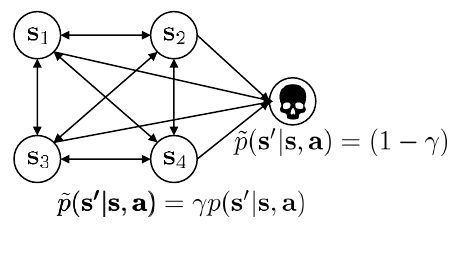
可以被看作是每一步“存活”的概率。 意味着每一步都有 的概率游戏突然结束(死亡)。因此,未来的奖励因为“可能拿不到”而被打折了。
向Policy训练引入折扣因子:
Option 1 :
- 特点: 只有回报(Reward)被打折了(右边括号里有 ), 但是梯度(Gradient) 前面没有乘 。
- 这意味着:无论是在第 1 步还是第 1000 步,只要发生了更新,我们都同等重视。
Option 2 :
- 特点: 梯度前面也被打折了 ()。
- 来源: 如果你严格对 求导,数学上确实会得到这一项。这意味越靠后的时间步,对总梯度的贡献越小(因为 )。
选择
- 如果我们使用 Option 2(对梯度打折),那么在 步时的梯度权重几乎为 0。这会导致智能体根本不关心游戏后期的表现,因为它觉得那里的梯度微不足道。
- 但实际上,如果智能体成功活到了第 1000 步,那么在那个状态下做正确的动作(比如继续保持平衡)是至关重要的。
- 我们不希望因为“那个时刻在很久的未来”就忽视在那里的学习。
- 因此,我们在实践中人为地去掉了梯度前面的折扣因子 ,只保留了回报里的折扣因子。这虽然在数学上是有偏的(biased wrt the original objective),但在优化上是更合理的,因为它鼓励智能体在任何时刻都争取最优。
- 写代码时,计算 Advantage 或 Reward-to-go 要用折扣因子(),但在累加 Loss 或梯度时,不要乘以 来衰减这一步的权重。

当我们实际要把代码写出来时,需要做哪些决定。
-
网络架构 (Architecture Design) :
-
Two Network Design: Actor 和 Critic 各自拥有独立的神经网络。
- 优点:简单、稳定,两个网络互不干扰,梯度更新清晰。
-
Shared Network Design: 两个网络共享前几层的特征提取器(如 CNN/ResNet),只在最后分叉出两个头(Head):一个输出动作概率 ,一个输出价值 。
- 优点:高效(只需一次前向传播),特征共享能加速学习。
- 缺点:调节 Loss 的权重(Actor loss vs Critic loss)会比较麻烦,有时候 Critic 可能会把特征层带偏,导致 Actor 变差。
-
-
并行化 (Parallelism) :
- 只要是 Online 算法,单线程跑通常太慢。
- Synchronous (A2C) : 多个工人并行采样,等到大家都做完一步,把梯度汇总,同步更新一次网络。这更适合 GPU 训练(Batch Size 大)。
- Asynchronous (A3C) : 多个工人各跑各的,谁跑完谁就去更新全局网络,不用等别人。这更适合 CPU 集群。
如果你依然不满足Online 算法地最大缺点 – 样本利用率低,接下来探索的主题是Offline Actor-Critic算法。
直接把 Replay Buffer 塞进 Actor-Critic 的算法, “This algorithm is broken!”
-
Bug 1: 价值估计错误 (Not the right target value) 。
- 在 Buffer 里的数据 是旧策略产生的。如果我们直接用 更新 Critic,这里的 隐含的意思是“在 之后继续按照旧策略玩下去的价值”。但我们需要的是“按照当前新策略玩下去的价值”。
-
Bug 2: 动作不匹配 (Not the action would have taken) 。
- 计算梯度 时,我们用了 Buffer 里的历史动作 。但当前的策略 在状态 可能根本不想做动作 。强行用旧动作去更新新策略,会导致策略学偏。
修复方案 1: 修复 Critic :
-
我们不能再只拟合 了,因为 这种“状态价值”本身就绑定了策略。
-
改用 Q-Function。我们拟合 。与具体的action耦合,不与策略耦合!
-
Target 计算:。
- 关键点:这里的 不是从 Buffer 里拿的,而是用当前最新的策略 实时算出来的 ()。这确保了 Critic 评估的是当前策略的未来。
修复方案 2: 修复 Actor:
-
我们不能直接用 Buffer 里的 来算 Policy Gradient。
-
再次利用当前策略。
-
做法:对于状态 ,我们忽略 Buffer 里当时做了什么动作 。我们让当前的 Actor 在 下重新采样一个动作 。
-
新梯度:。
- 这实际上把问题转化为了一个“最大化 Q 值”的优化问题:即寻找一个动作 ,使得 Critic 给出的评分 最高。这就是 SAC (Soft Actor-Critic) 和 DDPG 等现代算法的雏形。
严格来说,我们的目标是优化当前策略在它自己虽然我们在数学上稍微“作弊”了一下,但这其实不是坏事。我们原本只想让策略在它常去的地方表现好,现在我们让它在一个更宽更广的分布 (broader distribution) 上都表现好 。这反而增加了策略的鲁棒性(泛化能力)。产生的状态分布下的表现,但我们现在是在优化它在历史状态分布下的表现。
nothing we can do here, just accept it。
Actor-Critic是一个很通用的框架,其具体的算法有如下:
-
更高级的 Q 函数拟合
- Double Q-learning、Dueling Networks
-
重参数化技巧 (Reparameterization Trick)
- 针对梯度计算,虽然公式写的是标准的 Log-Likelihood 梯度(类似 REINFORCE),但幻灯片提到可以使用 Reparameterization Trick 来更好地估计积分。
- 这是 Soft Actor-Critic (SAC) 的核心技巧。它不是像 REINFORCE 那样根据采样的好坏来调整概率,而是利用 这样的公式,让梯度直接穿过采样过程传回 Actor 网络。这能极大降低方差,提高学习效率。
- 你在前面学到的所有“修复”步骤(用 Q 网络、Off-Policy、重新采样动作),加上熵正则化(Entropy Regularization),就是大名鼎鼎的 SAC 算法。它是目前连续控制领域最常用、最强大的算法之一。
-
确定策略(不想采样)
- DDPG (Deep Deterministic Policy Gradient) 和 TD3 算法
Advanced Advantage Estimation
回顾三种写法:
-
Actor-Critic: 用 。
-
Policy Gradient : 用 。
-
混合法 : 用 。
- 这里我们把 Critic 仅仅当作 Baseline 减去,而目标回报仍然使用真实的蒙特卡洛回报 。
- 因为 Baseline 不改变梯度的期望,所以这是 无偏差 (Unbiased) 的;同时因为 比常数 更准,所以方差比纯 PG 低。但是方差依然比较高因为MC。
- 更复杂的 Q-Prop 算法(Gu et al. 2016)。
- 核心思想是利用数学上的“控制变量法”,试图在保持无偏差的前提下,进一步利用 Critic 来降低方差。这是一个比较高阶的技巧,通常只在极度追求样本效率时使用。
N-step Return:
-
公式:。
-
含义:先真实地走 步(累加这 步的真实奖励),站在第 步的位置,再用 Critic 预测剩下的未来。
-
效果:通过调节 ,我们在 Bias 和 Variance 之间找到了一个平衡点。通常 效果更好。
-
动机: 既然 N-step 的 选多少是个难题,我们能不能全都要?
-
GAE 公式:
-
这里的 就是最简单的 TD Error。
-
直观理解: GAE 就是把未来所有的 TD Error 加起来,每往后一步,乘衰减系数 。
-
是 GAE 引入的一个新超参数:
- : TD
- : Monte Carlo
- : 处于中间的甜蜜点,通常取 0.95 左右。
GAE 是目前 PPO 等主流算法中计算 Advantage 的标准方式。
Value Function Method:A Unified Perspective
假设你已经自学或者阅读 RL00-XJTU-UnderGraduate-RL 已掌握以下知识:
-
Dynamic Programming --> Policy Iteration Value Iteration
-
Tabular Q-learning --> DQN 。(表格维度灾难)
这里是根据CS285增量补充一些内容。
从 “拟合迭代 (Fitted Q-Iteration)”到“在线交互 (DQN)”
Trick 1:利用 Q 定义绕过模型我们不再需要预测 ,因为数据集里的四元组 已经告诉了我们:在 执行 后,环境(Dynamics)把我们带到了 。这一步是 Model-Free 的关键。
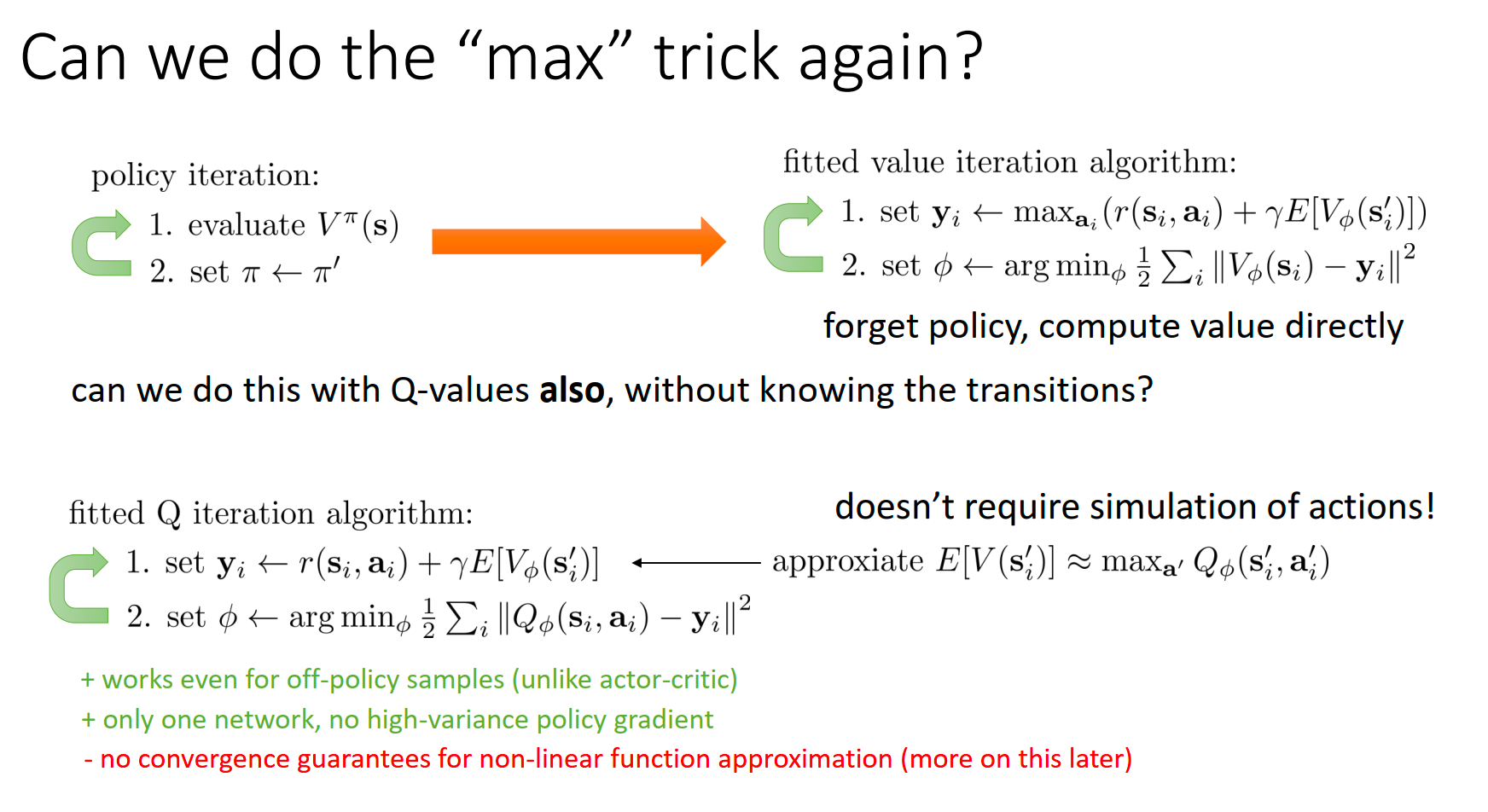
Trick 2:“Max” Trick 的再应用 (Bootstrapping)
我们如何估计下一时刻的价值 ?
PPT 右侧给出了关键近似:
这就是所谓的 “Max Trick”。我们不需要知道策略是什么,直接贪婪地认为下一时刻我们会选取让 Q 值最大的动作。
-
优点 (Green) :
- Works for off-policy samples:这使得它可以直接用于 Offline RL。你可以用别人收集好的数据(RoboTwin benchmark)来训练你的策略,而不需要像 Actor-Critic 那样必须用当前策略去采样。
- Only one network:不需要 Actor 网络,只要训练好 Critic (Q网络),策略就是隐式的 。
- No high-variance policy gradient:回归问题通常比梯度估计方差更小,训练更稳定。
-
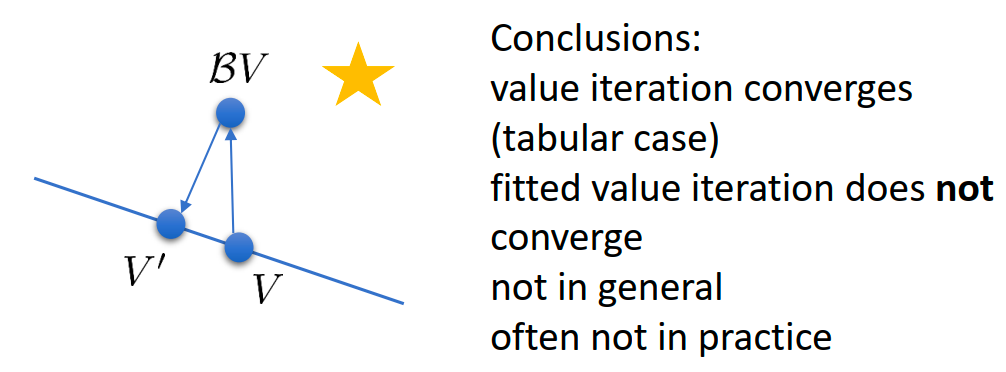
缺点 (Red - A Sad Corollary) :
- No convergence guarantees for non-linear function approximation:这是最令人沮丧的结论。
- 当我们将 非线性函数近似 (Neural Nets) + Bootstrapping (利用 max Q 更新) + Off-policy 数据 结合在一起时。理论上它是不保证收敛的,甚至可能发散。

如果想要offline算法转online算法,从全量数据的最小二乘回归(Full Least Squares) 变成了 随机梯度下降(Stochastic Gradient Descent, SGD)即可。
对以上式子求导可以得到以下的梯度更新式子:
同时上式中的具体计算公式如下:
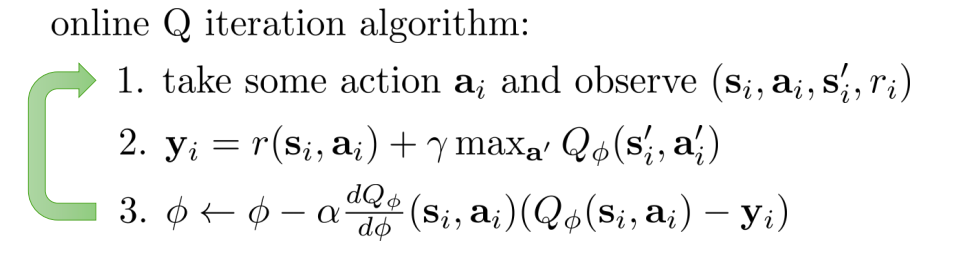
在 上图 的 step1 中,可以Epsilon-Greedy 以及 Boltzmann Exploration (Q 值越高的动作被选中的概率越大: )当然这种探索的方法你可能觉得太简单了,以后再discuss exploration in detail。
深入的收敛性理论(Why Deep RL fails?)
这是理解为什么 Deep RL 需要各种 Trick(如 Target Network, Double Q)的根本原因。这部分数学味儿比较重。
表格型 (Tabular) 情况下,Bellman Operator 是一个 收缩映射 (Contraction) ,这意味着只要迭代次数够多,它一定会收敛到最优解 。
引入了神经网络(函数近似),这在数学上等同于增加了一个 投影算子 (Projection Operator **** )
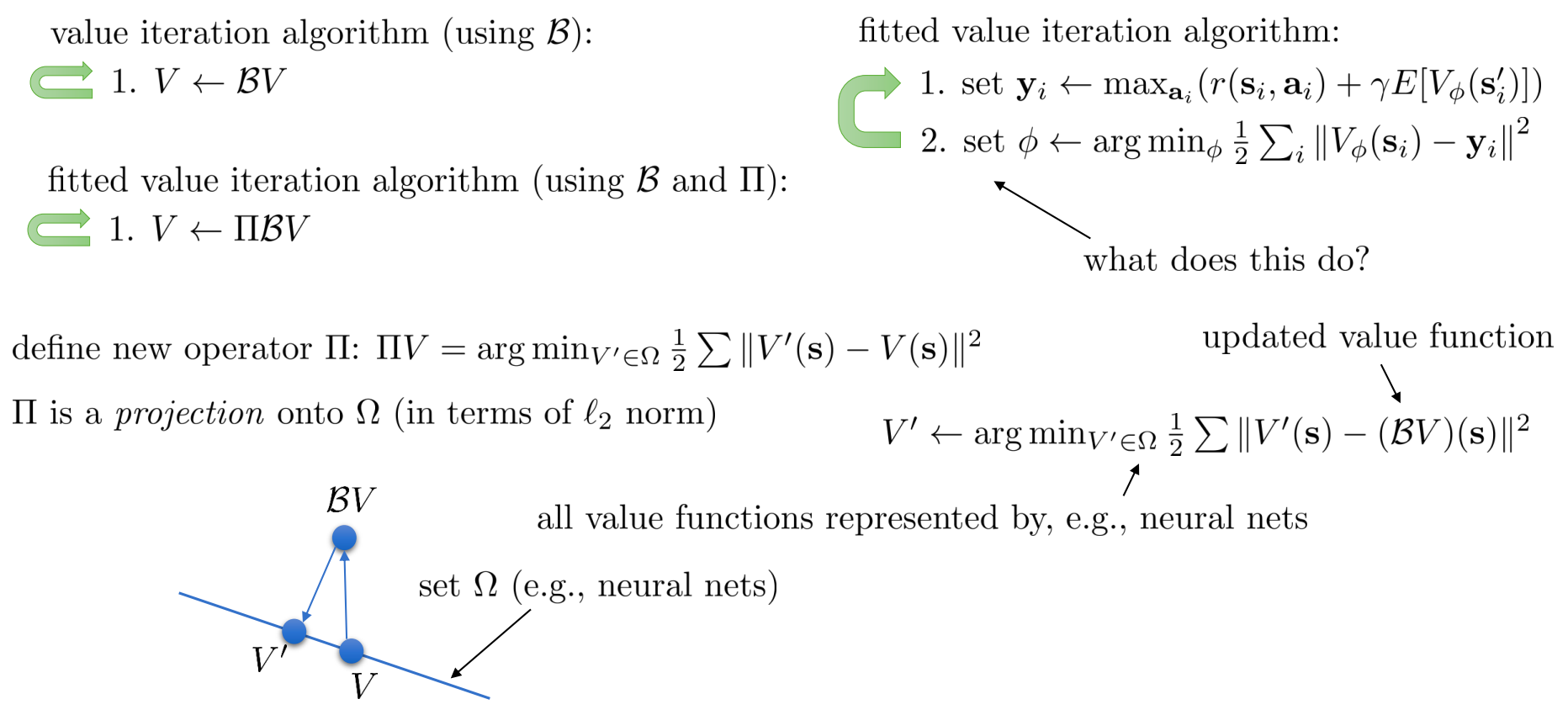
虽然 是收缩的, 也是收缩的
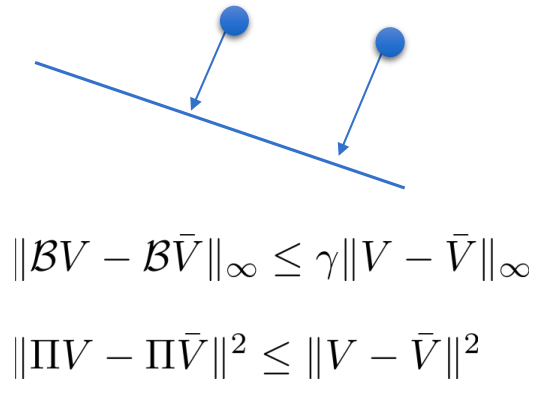
但是它们的组合 (投影后更新) 并不一定是收缩的 。
- Q-Learning 不是真正的梯度下降!
- 原因:在真正的梯度下降中,目标值 应该是常数。但在 Q-Learning 中,目标值 本身也包含了网络参数 。
- 后果:当我们计算梯度时,我们强行忽略了 对 的依赖(即我们把 Target Q 当作了常数,没有对它求导,也就是所谓的 Stop Gradient)。这意味着我们并没有在优化一个固定的 Loss Function,而是在追逐一个不断移动的目标。这是 Deep RL 难以收敛的根本原因之一 。
Actor-Critic 与 Value-Based 的本质关系
在Actor-Critic方法中,如果我们将 Policy 设为确定性的贪婪策略 (),从而将 Actor-Critic 演变成了纯粹的 Value-Based 方法。这确立了 Value-Based 方法其实是 Actor-Critic 的一种特例。
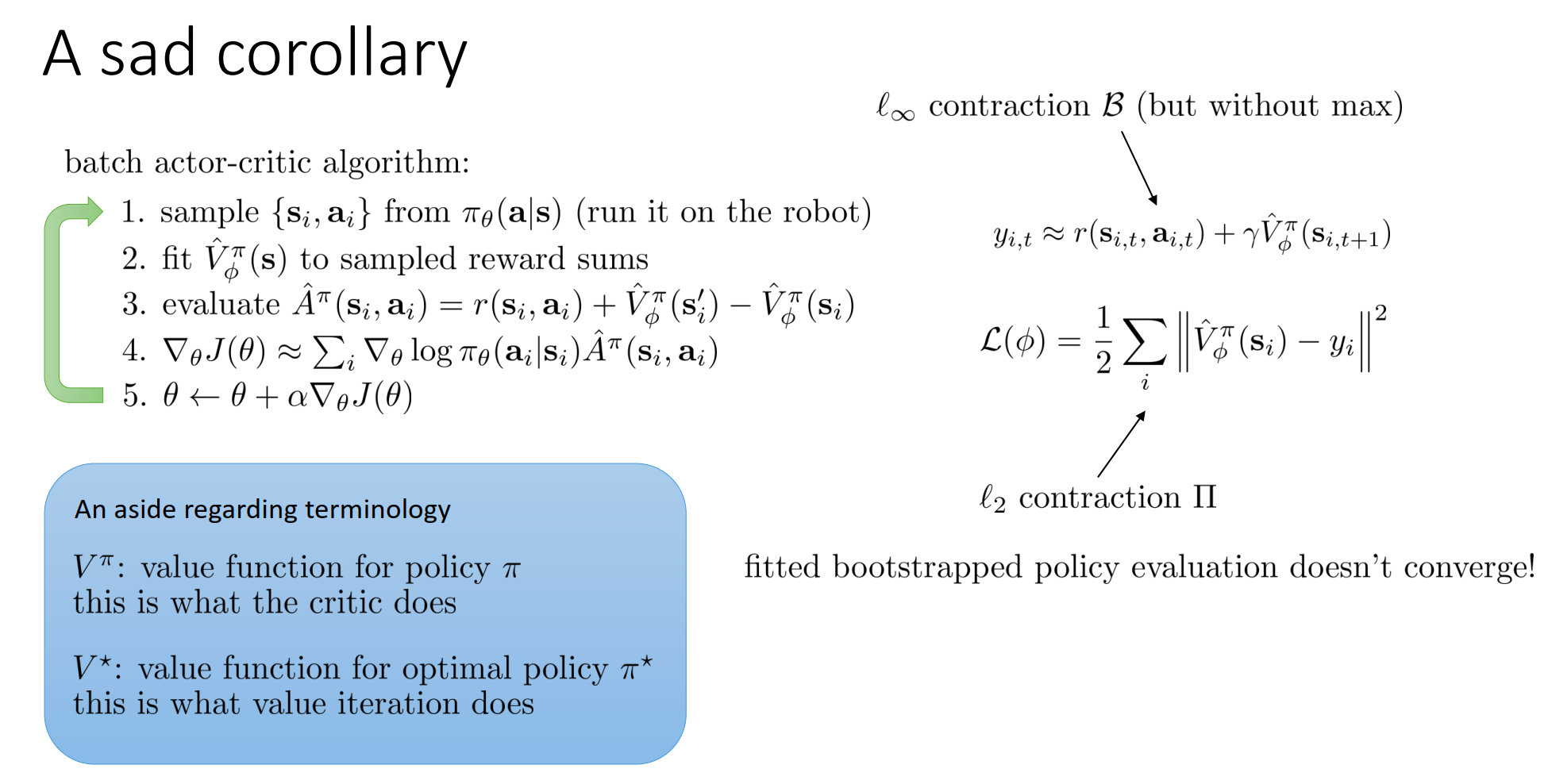
只要你用了神经网络(非线性函数近似)和 Bootstrapping(TD Learning),无论是有 max 的 Q-Learning 还是没有 max 的 Actor-Critic,收敛性都无法从理论上得到保证。
这就是著名的 “Deadly Triad” (死亡三角) 的体现:
- Function Approximation (神经网络)
- Bootstrapping (利用 更新 )
- Off-policy / Batch data (离线数据或并非完全实时的在线数据)
所以在理论上无法保证收敛的情况下,我们更追求算法的稳定性,让训练过程没那么容易崩溃,即使是PPO算法也是一种on-policy-ish-style方法,追求学习的稳定性,并没有从理论上解决这个问题。
Deep RL with Q Function
假设你已经自学或者阅读 RL00-XJTU-UnderGraduate-RL掌握了Double DQN 、Dueling DQN 、Replay Buffer 。
连续动作空间的 Q-Learning (Continuous Actions)
DQN 中最核心的操作是 。在离散空间(如雅达利游戏,只有上下左右)这很容易;但在连续空间(如机械臂关节角度),你无法穷举所有 来求 max。这是将 Q-Learning 应用于机器人的最大障碍。
3种解法
- 随机采样 / CEM :简单粗暴,但在高维失效。
- NAF (Normalized Advantage Functions) :这是一个很聪明的技巧。强制让 Q 函数关于动作 是二次型 (Quadratic) 的,这样 就有解析解(Closed-form solution)。这是早期的经典方法。
让我们拆解这个公式的数学含义:
- :这是状态价值函数 (State Value) ,代表在该状态 下所能获得的最佳预期回报。
- :这是一个与动作 维度相同的向量。它代表了当前状态下的最优动作。
- :这是一个正定矩阵(Positive-definite Matrix)。它决定了 Q 函数曲面的“开口”大小和方向。
- 优势函数 :注意看第一项,它是一个形如 的结构。因为 是正定的,所以这一项永远小于等于 0。它本质上是一个开口向下的抛物面。
这样的设计让最大化操作变得简单,因为优势函数小于等于0,所以直接输出就是action。
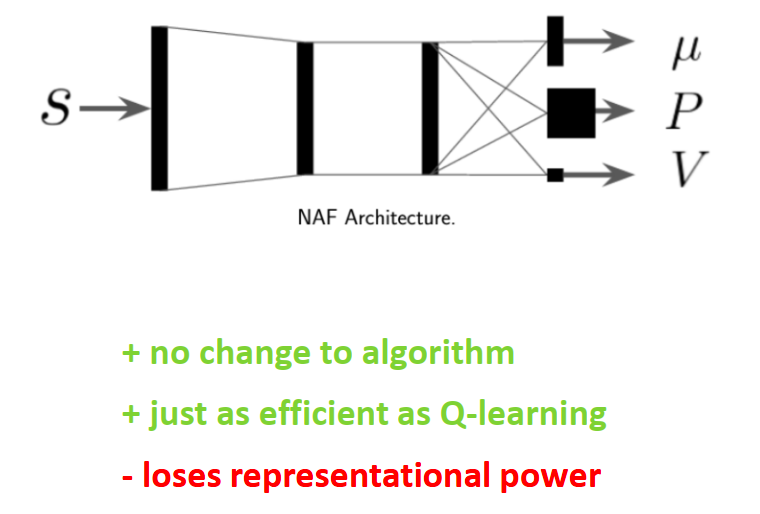
Loses representational power (丧失了表达能力) 是最大的代价,它强行假设 Q 函数关于动作 是一个单峰的二次函数 (Unimodal Quadratic Function)。 在复杂的机器人任务中,最优动作可能有多个(Multimodal)。比如绕过障碍物,从左边绕(动作 A)和从右边绕(动作 B)可能都是好的,但中间(直撞)是坏的。NAF 这种“单峰抛物线”无法表达这种“双峰”分布,它只能取中间的平均值,可能导致撞上障碍物。
- DDPG / Approximate Maximizer
我既要 Q 函数保持复杂的非线性(Deep Neural Net),又要能算出 。怎么办?–> 训练策略网络 来专门负责“找最大值”。
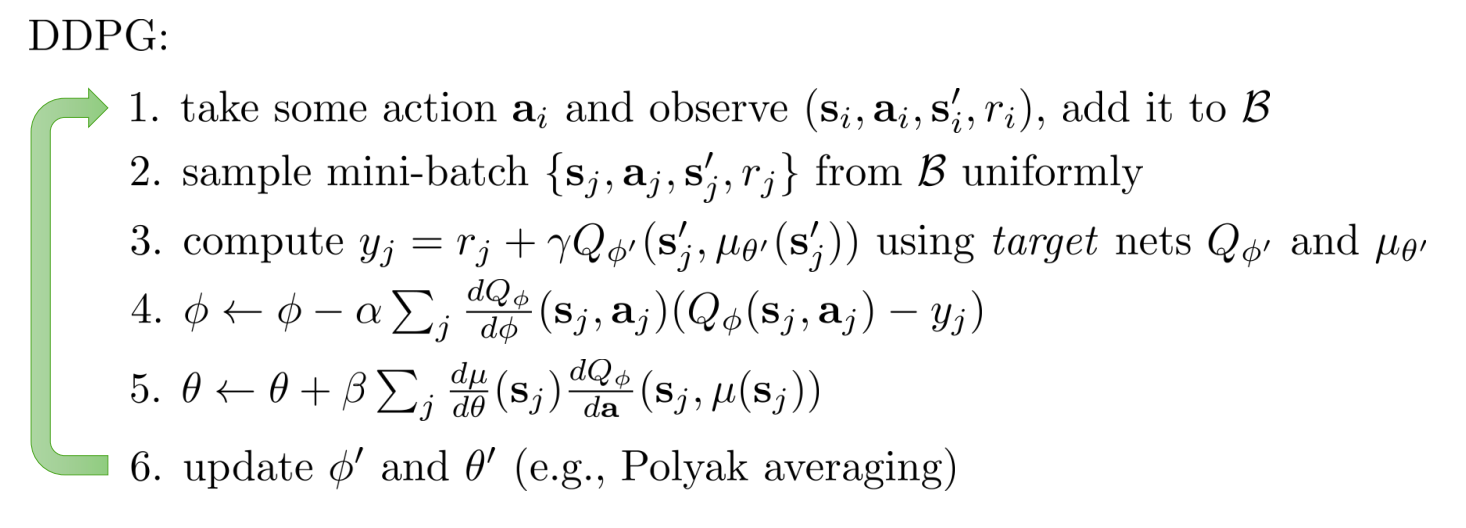
Sergey Levine 的犀利评价:虽然 DDPG 名字里带有 “Policy Gradient”(属于 Actor-Critic),但本质上它其实是 Approximate Q-Learning。这里的 Actor 不是为了去优化某种随机策略的期望回报,而仅仅是作为求解 操作的一个计算组件。
更新 Target Networks (软更新/Polyak Averaging):
DDPG 不像 DQN 那样每隔 N 步硬拷贝参数,而是每一步都做一点点滑动平均:
这是 DDPG 能够稳定训练连续动作的关键技巧之一。
DDPG 虽然解决了连续动作问题,但它对超参数非常敏感且容易发生 Q 值高估(Overestimation)。后来的 TD3 (Twin Delayed DDPG) 和 SAC (Soft Actor-Critic) 都是基于 DDPG 的架构改进的。Google 的 QT-Opt 算法,其本质就是 DDPG 的一种变体(移除了显式的 Actor,用 Cross-Entropy Method (CEM) 来替代 做最大化,或者在大规模分布式下做近似)。
DDPG 是现代 Continuous Control Deep RL 的开山之作
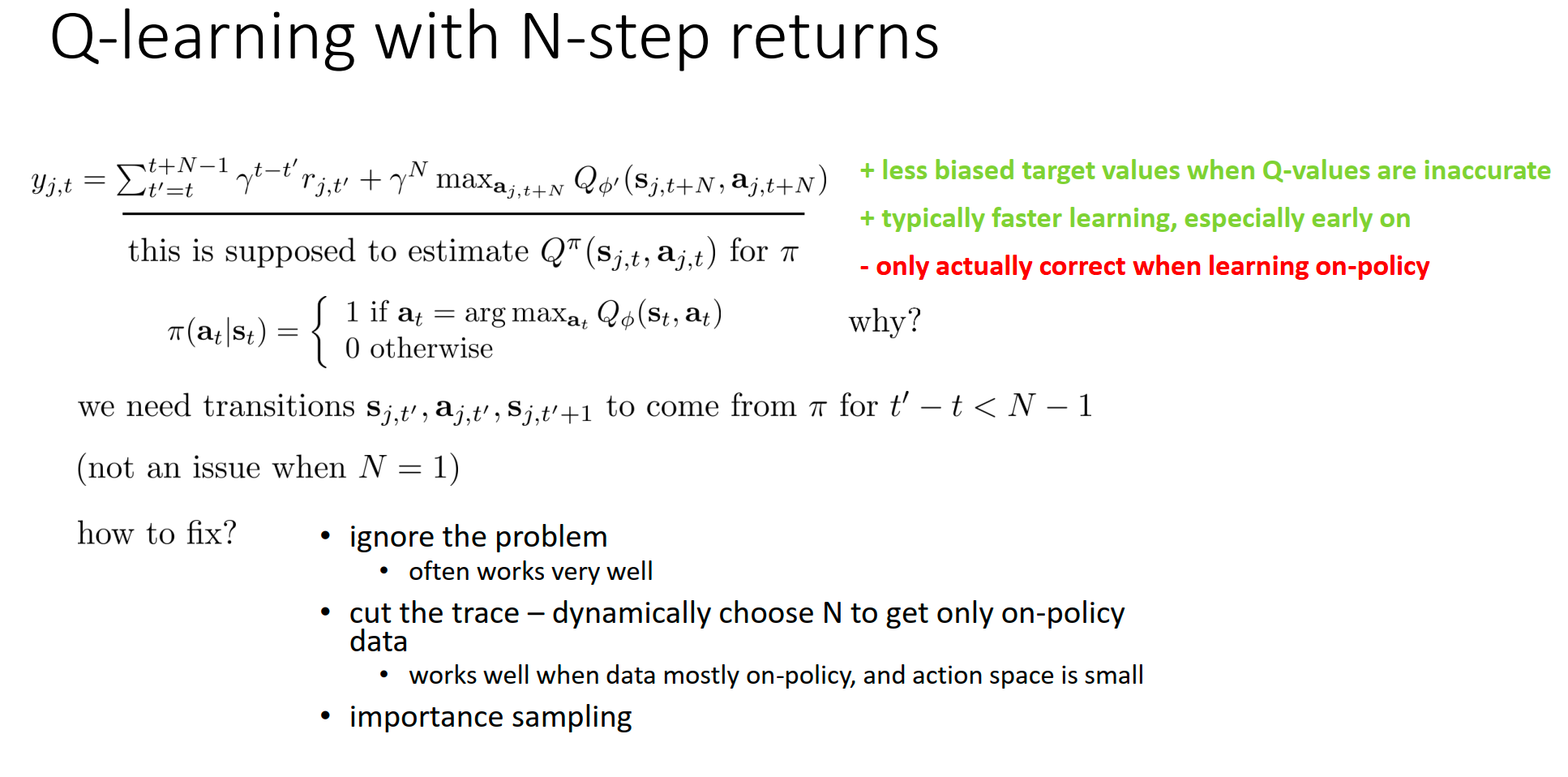
1-step 传播不仅有高偏差的缺点,而且由于奖励信号只传给了一个step,信号传播慢学习速度慢。N-step 却 “only actually correct when learning on-policy”。
-
如果是 1-step :我们只用到 。
-
如果是 N-step :公式里包含了 (它是由 产生的)。但是!Buffer 里的 是旧策略选的,而我们的当前策略在 时可能根本不会选这个动作!
-
结论:你在优化当前策略的 Q 值,却强行使用了旧策略产生的动作路径和奖励。这就导致了数学上的不正确。
-
Ignore the problem (掩耳盗铃) :
- 做法:假装没看见这个问题,直接用 N-step。
- 效果: “often works very well” 。这是最骚的操作,很多著名的算法(如 Rainbow DQN, R2D2, Ape-X)在很多情况下其实就直接用了 N=3 或 N=5,只要 N 别太大,Off-policy 带来的误差可以被忽略。
-
Cut the trace (动态截断) :
- 做法:检查 Buffer 里的动作 和当前策略 是否一致。如果不一致,就在这里截断,只用前面的 步回报。
- 效果:能保证正确性,但如果策略变化太快,N 会经常被截断成 1。
-
Importance Sampling (重要性采样) :
- 做法:通过乘上概率比 来修正回报。
- 效果:数学上最正确,但方差会爆炸,很难调参(Retrace 算法就是为了解决这个问题)。
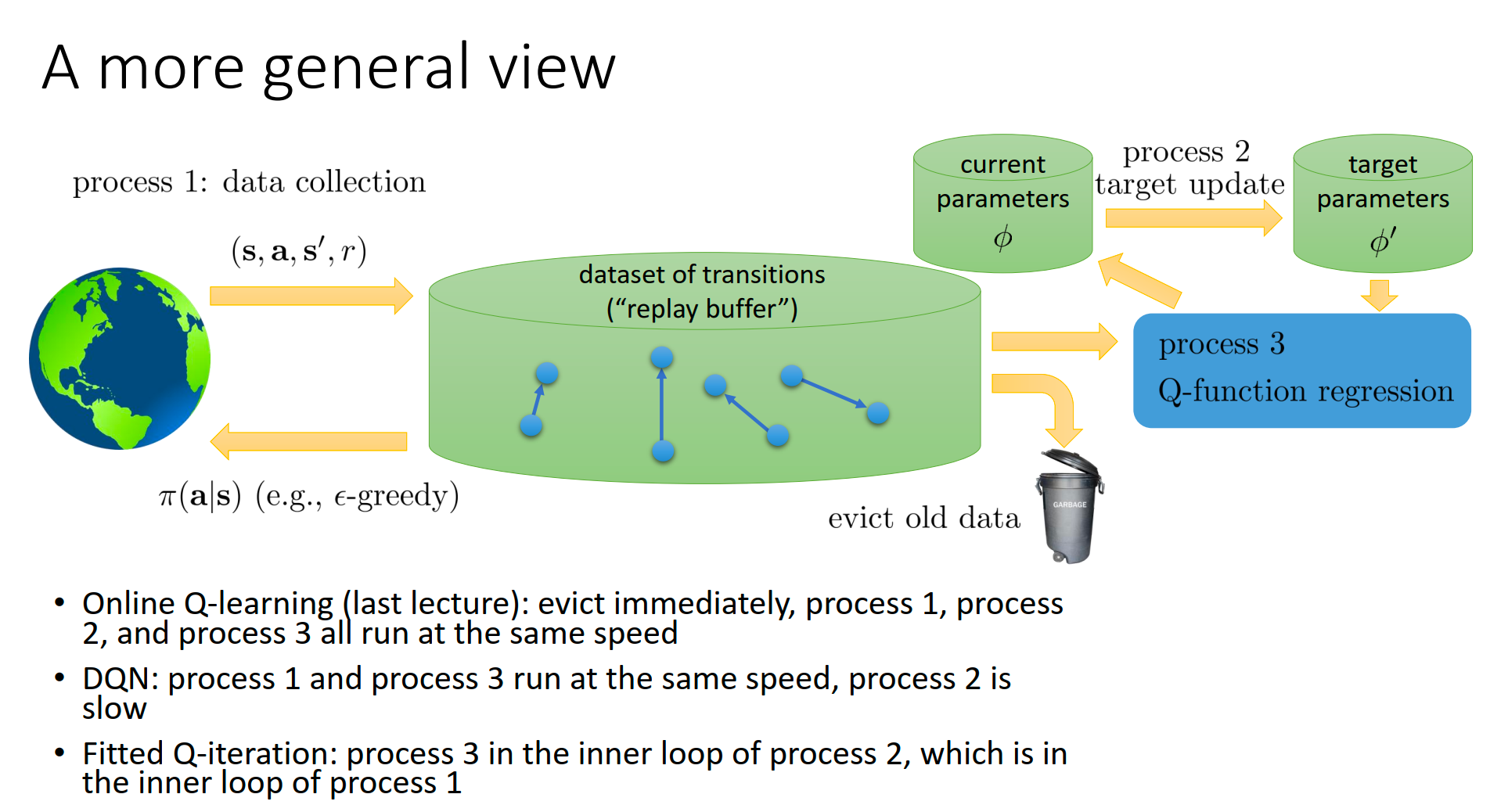
Process 1: Data Collection (数据收集)
- 角色:Actor(与环境交互者)。
Process 3: Q-function Regression (Q 函数回归/训练)
- 角色:Learner(学习者)。
Process 2: Target Update (目标网络更新)
- 角色:Stabilizer(稳定器)。
Algorithms defined by Speed
-
Online Q-learning
- 配置:所有进程同速运行。
- 逻辑:收一个数据 -> 训一次 -> 目标网络立刻变。
- 特点:Evict immediately(Buffer 大小为 1,即没有 Buffer)。这就是最原始的、不稳定的 Q-Learning。
-
DQN (Deep Q-Network)
- 配置:Process 1 和 Process 3 速度相近,但 Process 2 is slow。
- 逻辑:一边收集数据一边训练(Off-policy),但是目标网络 很久才更新一次(比如每 10000 步)。
- 意义:让 Target 慢下来,是 DQN 能够稳定训练神经网络的关键。
-
Fitted Q-iteration (FQI)
-
配置:嵌套循环结构。
-
逻辑:
- 先跑 Process 1 很久(收集一大批数据,填满 Buffer)。
- 然后进入 Process 2 和 3 的循环:固定 Target,疯狂跑 Process 3 直到收敛;然后更新 Target (Process 2),再跑 Process 3…
-
意义:这就是纯粹的 Batch / Offline RL 模式。
-
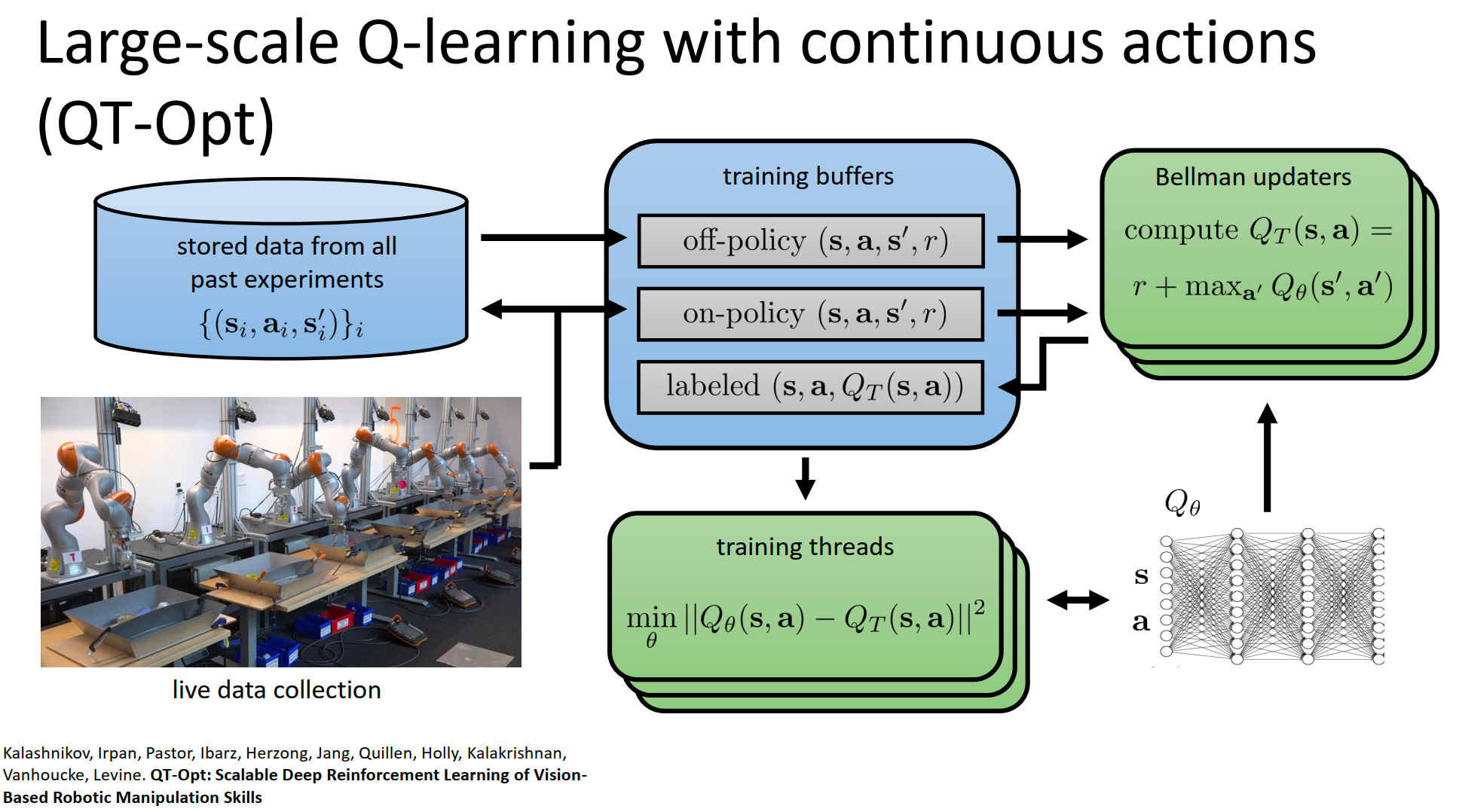
解耦:在 Google 的 QT-Opt(机械臂抓取)或 DeepMind 的 Ape-X 中,这三个进程是物理上分离的:
- Process 1:可能在 100 台真实的机器人上并行运行,只负责往云端 Buffer 发数据。
- Process 3:可能在 8 个 TPU/GPU 上疯狂跑 SGD,只负责从云端 Buffer 拉数据算梯度。
- Process 2:由参数服务器(Parameter Server)定期广播最新的权重给所有机器人。