RL01-BC-AIL-ModelBased
主要参考文献: 《模仿学习简明教程》 许天,李子牛,俞杨 NJU&&香港中文大学(深圳)
Introduction
-
什么是模仿学习?
-
核心定义:模仿学习就是从专家示例中学习 。它的目标是让智能体(机器人)能够像人类专家一样进行智能决策。
-
为什么需要它?:在通往通用人工智能的道路上,手动编程或设计奖励函数往往非常困难。
- 困难点:以自动驾驶为例,要手动把所有约束写出来(比如既要安全不撞车,又要开得平稳舒适)是非常复杂的,很难设计出完美的监督信号。
-
-
历史与应用:
- 早期案例:早在 20 世纪 80 年代末,CMU 的 Pomerleau 教授就用模仿学习训练出了能横跨北美的自动驾驶车(ALVINN)。
- 著名案例:AlphaGo 在击败人类顶尖棋手之前,也使用了模仿学习来学习人类棋谱。
- 现代应用:推荐系统、网约车派单系统等,也利用模仿学习来构建虚拟世界,让 AI 在里面试错。
-
两大算法流派:
- BC : 本质上把模仿学习当成回归或分类问题来解。
- AIL(Adversarial IL) : 通过逆强化学习 (Inverse Reinforcement Learning, IRL) 的思想。构建一个“对抗的奖赏函数”,然后通过最大化这个奖赏来模仿专家。
-
适合人群:对模仿学习理论感兴趣,或者希望通过理论分析来改进算法的研究者。
背景介绍
Markov Decision Process
马尔可夫链 (Markov Chain), 最基础的随机过程:在一个有限的状态集合中,未来的状态只取决于当前的状态,而与过去无关。 。
-
状态转移矩阵 (Transition Matrix )
- 元素含义: 表示从状态 转移到状态 的概率。
- 每一行的和必须为 1()。这意味着从任何一个状态 出发,它下一时刻总得去某个地方(或者留在原地),所有可能去向的概率加起来必须是 100%。
-
轨迹概率的计算 (Trajectory Probability)
- 目标轨迹 :
- (初始概率一般已知,:查矩阵第1行第2列,以此类推)
在此基础上加上Action 和 Reward 就变成了 MDP。
- 动作空间 :智能体可以采取的动作。
- 奖励函数 :衡量某一步做得好不好,。
- 状态转移
- 策略 (Policy) :表示在状态 下选择动作 的概率
无限长度的折扣MDP
-
折扣因子 (Gamma) : 引入了一个系数 。它的作用有两个:
- 数学上的收敛
- 重当下轻未来
-
核心目标:累积(期望)回报 : 这是衡量一个策略好坏的终极标准
- 有效决策长度:虽然说是“无限长度”,但在数学上,它等效于一个长度为 的任务 6。这告诉我们,太遥远的未来其实对当前的决策影响微乎其微。
-
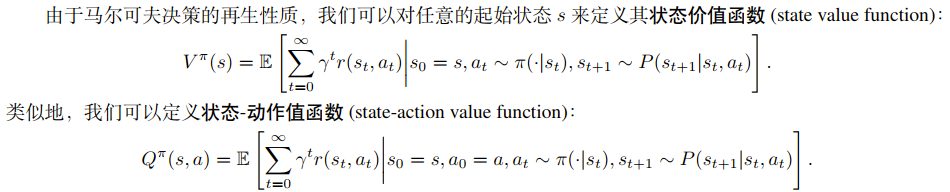
两个重要的值函数
- 状态价值函数
- 状态-动作价值函数
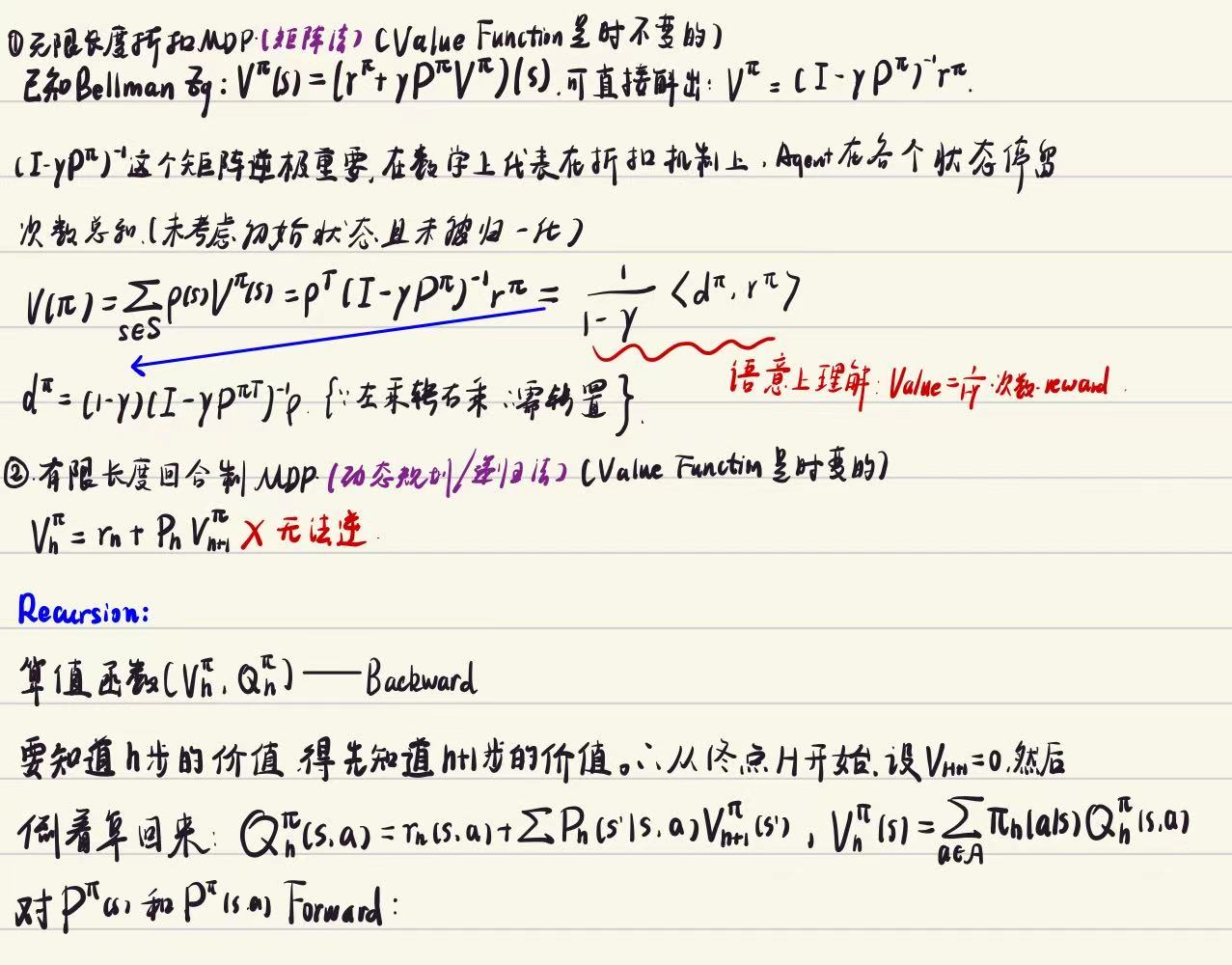
对偶表示 (Dual Representation)(这是本教程对模仿学习理论最重要的贡献之一)
状态访问分布
状态-动作访问分布


为什么这个公式极其重要?
- 它把时间序列的问题(一步步走,算累积奖励),转化成了空间分布的问题(算你在每个状态-动作对上出现的概率)。
- 对模仿学习的意义:如果我们想让智能体获得和专家一样的回报 ,我们不需要知道奖励函数 具体是什么。我们只需要让智能体的访问分布 去逼近专家的访问分布 。
- 只要两个人的“轨迹分布”重合了,无论奖励函数长什么样,他们拿到的总分一定是一样的。这就是对抗式模仿学习(如 GAIL)的理论基础:状态-动作分布匹配。
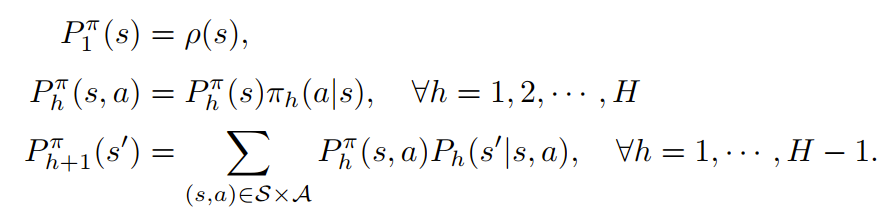
有限长度回合制马尔可夫决策过程 (Finite Horizon Episodic MDP)
(Horizon) :这是任务的最大时长(或回合长度)。比如一局游戏限制走 100 步,那么 。
时变策略-由于环境规则随时间变化,策略也必须随时间变化。
- 策略被定义为
- 直观理解:这就像打游戏,开局()的策略可能是“收集资源”,而结尾()的策略可能是“全力攻击”。

为什么没有折扣因子?
- 数学上的收敛性无需担心。
- 在这份教程的理论框架下,“有限长度 MDP”采用的是硬截断(Hard Cutoff) 的方式——在 步之内一视同仁(权重为1), 步之后完全忽略(权重为0)。教程中也提到,无限长度的折扣问题可以通过截断到 来近似 。这暗示了 **** (视野长度) 在这里其实起到了替代 **** (折扣因子) 限制“看多远”的作用。
模仿学习问题设定
我们假设存在一个表现不错的专家策略 。模仿学习的目标是训练一个智能体策略 ,使得它的累积回报尽可能接近专家。

虽然 RL 和 IL 的目标都是最大化回报,但是条件完全不同:
- RL:知道奖励函数,不知道怎么做最好。
- 模仿学习:不知道奖励函数(Reward Function is unknown),但手里有专家数据。
数据形式:专家数据 由 条完整的轨迹(Trajectory)组成: 。每条轨迹包含一连串的状态和动作:。
习题解析
已知环境参数(转移矩阵 和奖励 )时,如何算出策略到底好不好(算 )以及智能体爱去哪(算 )。
行为克隆
行为克隆算法
它的核心思想非常朴素:把模仿学习当成一个监督学习(Supervised Learning)问题来做。 也就是:看到专家在某个状态 做了动作 ,那我就强行记住“在 就该做 ”。
基本原理 – 最大似然估计(MLE)。
-
我们要找一个策略 ,让它在看到数据集 里的那些状态 时,产生专家动作 的概率最大。
这被称为最大对数似然估计。意思就是:调整我的策略,让我观测到的这堆数据出现的概率最大化。
如果状态空间 和动作空间 都是有限的(比如走迷宫,只有几个格子,只能上下左右),那么最优解非常简单,就是数数。
-
没见过的状态怎么办?
如果遇到一个状态 是专家没去过的,教程建议使用均匀分布(瞎猜),即 -
最大化似然度(MLE)在数学上等价于最小化策略分布之间的差异(KL 散度)。也就是我们在强行把我们的策略分布 拉向专家的分布 。
参数化方法 (针对连续/复杂空间)
在现实世界(如自动驾驶、机器人控制)中,状态往往是连续的(比如摄像头的像素、激光雷达的数值),我们不可能通过“查表数数”来解决,因为你几乎永远不会遇到两个完全一模一样的像素值。
这时,我们需要用函数近似(Function Approximation),比如神经网络,来表示策略 。目标函数转化为 公式 :
例题 3.1:Softmax 参数化(对应“分类问题”)
- 场景:动作是离散的(如:左转、右转、刹车)。
- 做法:神经网络输出一个向量,通过 Softmax 函数归一化成概率。
- 本质:这时候的优化目标,就是大家熟悉的分类任务里的交叉熵损失函数 (Cross-Entropy Loss) 。
例题 3.2:Gaussian 参数化(对应“回归问题”)
-
场景:动作是连续的数值(如:方向盘转动 23.5 度)。
-
做法:假设策略服从高斯分布(正态分布)。神经网络预测高斯的均值 。
如果我们假设高斯分布的方差 是个常数,那么最大化高斯分布的对数似然,数学上等价于: -
本质:这就是最经典的均方误差 (MSE) 回归。
总结:
- 如果动作是离散的 做分类 (Classification) 。
- 如果动作是连续的 做回归 (Regression) 。
复合误差
复合误差 (Compounding Error) 是模仿学习理论中最著名的概念之一,它揭示了行为克隆(BC)算法最大的“死穴”。
简单来说:一步错,步步错,最终满盘皆输。
教程引用了自动驾驶先驱 Pomerleau 的经典观察:
- 训练时:神经网络使用的是专家数据,专家开车很稳,总是在路中间,所以数据集中全是“在路中间如何微调”的样本。
- 测试时:神经网络自己开车。如果它犯了一个小错误(比如偏离了路中心 10 厘米),它就进入了一个训练集中从未出现过的状态(专家从没开偏过)。
- 后果:在未见过的状态下,神经网络可能不知所措,做出随机或错误的动作,导致车偏离得更远(比如偏离 1 米)。错误像滚雪球一样越来越大,直到撞车 1。
数学解释:分布漂移 (Distribution Shift)
-
问题的根源:
- 训练数据来自专家策略 产生的状态分布 。
- 测试/评估数据来自学习到的策略 产生的状态分布 。
- 因为 不可能完美复制 ,所以这两个分布是不一样的。

误差上界平方级别增加。
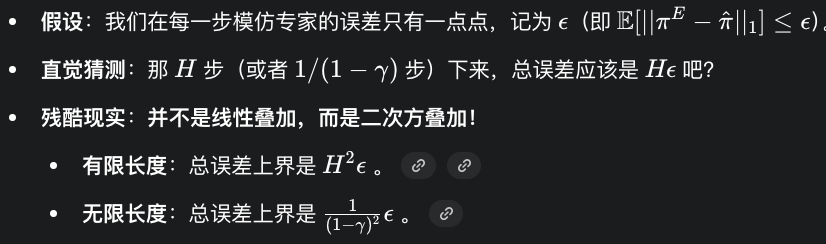
**为什么是平方级 (** )?
- 一个 来自于你做错了动作,当步的奖励丢了,并且影响了后面所有的步(失去了 个奖励)。
样本复杂度回答了“到底需要多少专家数据才能学好”的问题。
-
结论:在最坏情况下,需要的样本量 与 成正比。
- 无限长度: 。
- 有限长度: 。
-
极小极大最优 (Minimax Optimal):
教程中有一个非常重要的笔记指出:虽然 的误差看起来很糟糕,但在不知道环境转移概率(即不知道世界怎么运作)的情况下,行为克隆 (BC) 已经是我们能做到的最好的算法了 。这说明 的误差是这一类问题的固有难度,而不是算法设计得烂。

简单的行为克隆(BC) 虽然好用,但在长序列决策中非常脆弱。
DAgger
DAgger 全称是 Dataset Aggregation(数据集聚合) 。它的核心思想是:把“离线学习”变成“在线学习”,主动去问专家在那些陌生的状态下该怎么做。
每一次迭代循环: 混合策略 --> 收集数据 --> 专家标注 --> 聚合数据 --> 重新训练
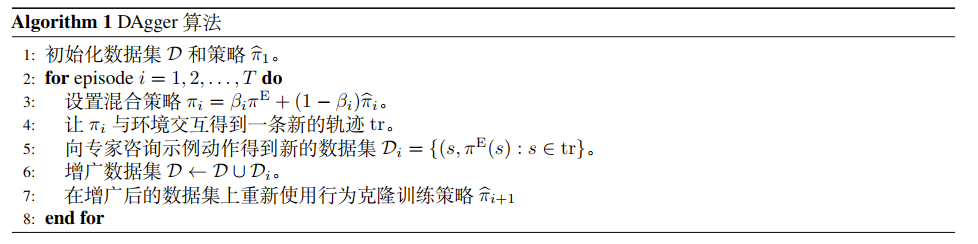
为什么它能解决复合误差? BC 失败是因为它没见过“跑偏”的状态。DAgger 强行让智能体去环境里“试错”,一旦跑偏,马上请专家打标签。这样,智能体就学会了如何从错误状态(跑偏)回到正确状态(路中心) ,从而消除了复合误差。
Debate
-
为 BC 辩护: 虽然 BC 有复合误差,但这不是算法的问题,是命题的问题。如果只给你一个固定的数据集(不准交互),从信息论的角度可以证明,任何算法在最坏情况下都会有复合误差。所以 BC 其实在它的设定下已经做得很好了。
-
对 DAgger 的冷静分析:DAgger 看起来很美好,因为它改变了题目设定(允许与环境交互+咨询专家)。
但是,理论分析表明,DAgger 未必比 BC 省样本。
- 原因:智能体一开始是瞎走的,它探索到的状态分布可能和专家真实的分布相差十万八千里。
- 结论:为了达到同样的精度(-最优),DAgger 需要咨询专家的总次数,在最坏情况下,可能并不比 BC 需要的样本量少 。
-
DAgger 的本质:通过人机回环(Human-in-the-loop) ,不断把智能体跑偏的那些“边缘情况(Corner Cases)”抓回来让专家重新教,从而增强系统的鲁棒性。
-
理论地位:DAgger 是工程上解决复合误差的有效手段,但在统计效率(样本复杂度)上,它并没有打破理论的上限。
对抗式模仿学习
个人talking – 这一章的学习价值
在目前的端到端自动驾驶(如 Tesla FSD V12 路线)和具身智能操作(如 Diffusion Policy, ACT 等)的主流落地中,简单的 Behavior Cloning (BC) 及其变体(配合 Transformer/Diffusion)占据了统治地位。
为什么AIL现在 “销声匿迹” 了?
在工业界和应用导向的研究中,对抗式模仿学习(AIL)确实面临几个痛点,导致它不如 BC 流行:
- 训练极不稳定:AIL(特别是 GAIL)借鉴了 GAN 的思路,是一个极小极大(Minimax)优化问题 。这意味着你需要同时训练一个判别器(Reward)和一个策略(Policy),很难调参,很难收敛。相比之下,BC 只是一个稳定的监督学习(回归/分类)。
- 采样效率低:AIL 本质上是在做强化学习(RL),需要智能体与环境进行大量交互 。在真机机器人或自动驾驶中,通过“试错”来学习太昂贵、太危险。
- BC 变强了:随着 Transformer 和 Diffusion Model 的引入,BC 对多模态分布的拟合能力大幅增强,掩盖了它在理论上的部分缺陷(复合误差)。
但如果想做Post-Training RL(训练后强化学习)或者深入理解为什么 BC 会失效,这一章包含非常关键的理论视角:
-
理解BC的理论天花板(State-Action Distribution Matching)
-
Post Training RL的基本石(Reward 也是学出来的):
- 现在的具身智能前沿(如 VLA 模型)开始探索 Post-Training 阶段。在这个阶段,单纯的 BC 已经不够了,我们需要 RL 来进一步微调模型。
- Reward 从哪来? 在精细装配等任务中,很难手工写出完美的 Reward 函数。
- AIL 的启示:AIL 的核心思想就是逆强化学习(IRL) ——让判别器充当 Reward Function。
- 连接:目前的很多前沿工作(如利用人类反馈、利用 VLM 打分)本质上都是在构建一个“判别器”或“奖励模型”,然后用 RL 去优化。这正是这一章讲的 “极小极大优化建模” 的思想。
-
TAIL 和 MIMIC-MD 算法,展示了如何结合 BC 的优势(利用数据)和 AIL 的优势(利用环境模型)
- TAIL 的核心是利用环境的转移概率信息来辅助模仿 --> 现在的变体 World Models (世界模型) Based RL
- MIMIC-MD 的核心思想是:只在数据集覆盖的状态上模仿专家,别的地方不要瞎猜 --> 现代变体:Offline RL (离线强化学习) 中的“保守主义” 在 Post-Training RL 中,我们最怕模型在没见过的数据上乱动(OOD Action)。现代算法通过正则化项来惩罚偏离数据集分布的行为。–> CQL (Conservative Q-Learning) , IQL (Implicit Q-Learning) 。
- 现在倾向于使用 DPO,RL-VLM-F。
所以这章的学习对我而言是轻推导重理论思想的。
状态动作分布匹配
-
出发点:回顾之前的对偶公式:。只要模仿策略的状态-动作访问分布 和专家的分布 长得一样,那么无论奖励函数 是什么,它们得出的总分 一定是一样的,即奖励无关性。
- “既然模仿学习不知道真实的奖励函数 ,你怎么敢保证你学出来的策略也是高分的?”
- 与其学习策略,不如直接匹配分布。
-
新的目标函数 :因此,AIL 的目标不再是最小化动作误差,而是最小化两个分布之间的距离:
其中 是某种距离度量(比如后面会用到的 TV 距离或 JS 散度)。
教程再次利用 Reset Cliff 环境来对比两种准则,这是理解 AIL 优势的关键:
-
BC 的准则( 策略分布匹配 ):
BC 关注的是 。在没见过的数据(未访问状态)上,BC 倾向于瞎猜(均匀分布)。在 Reset Cliff 中,这意味着它有概率走到坏状态 并掉下去,导致复合误差。 -
AIL 的准则( 状态-动作分布匹配 ):AIL 关注的是 。
- 专家的数据显示:在坏状态 上的访问概率是 0()。
- 为了让两个分布匹配,AIL 强迫智能体的策略也不能访问状态 。
- 结果:智能体为了不让 变成正数,会主动学会避开那些通往 的路,即使在数据集中没见过这些具体的动作。这就在根本上避免了复合误差。
虽然理念很美好,但在实际操作中,我们并没有上帝视角拿到真实的专家分布 ,我们只有一堆离散的数据点 。
-
最大似然估计 (MLE):我们只能用“数数”的方法来估计专家的分布 。
-
定理 4.1 (反直觉的样本复杂度):如果我们用 TV 距离(Total Variation Distance)作为度量标准来优化,需要的专家样本量 是多少?
- 结论:。
- 对比:之前 BC 的样本复杂度是 ,而这里是 。
- 这意味着什么? 当我们要求精度很高( 很小)时,比如 ,BC 可能只需要 100 个数据,而 AIL 可能需要 10000 个数据!
-
原因分析: 这并不是因为 AIL 的策略差,而是因为统计估计太难了。 我们要从有限的数据中估计出一个完美的概率分布 ,这个估计过程本身的误差收敛速度很慢(速率为 ),从而拖累了整个算法的样本效率。
小总结:
- 好消息:从机理上讲,状态-动作分布匹配(AIL)比BC更高级,因为它能通过“拒绝访问坏状态”来自动修正复合误差。
- 坏消息:从统计上讲,直接做分布匹配非常昂贵。因为仅仅通过有限的样本去还原一个高维分布是非常困难的,这导致传统的 AIL 算法(如 GAIL, FEM)在最坏情况下的样本效率其实不如 BC。
极小极大优化建模
原始目标:我们的理想是直接最小化模仿策略 和专家 之间的距离(比如 TV 距离):
你很难直接告诉神经网络,概率分布往哪里改一点点,好让积分距离变小。
解决方案:对偶表示 (Dual Representation) 数学上, 范数(TV 距离对应 )有一个“对偶形式”。利用这个性质,我们可以把“最小化距离”转化为一个极小极大(Minimax) 问题
-
就是奖赏函数 (Reward Function) :如果我们把 看作奖励,那么 其实就是策略在 下的累积回报 。
-
However,这里的 其实是一个第一层逻辑里说的那个“真实奖励 ”。它是依据对偶公式制造出来的 “Fake Reward” 。
- 真实奖励 :代表任务的终极目标(比如“把螺丝拧紧”)。
- 对抗奖励 :代表两个分布目前的差异程度(比如“你现在的姿势和专家不太像”)。
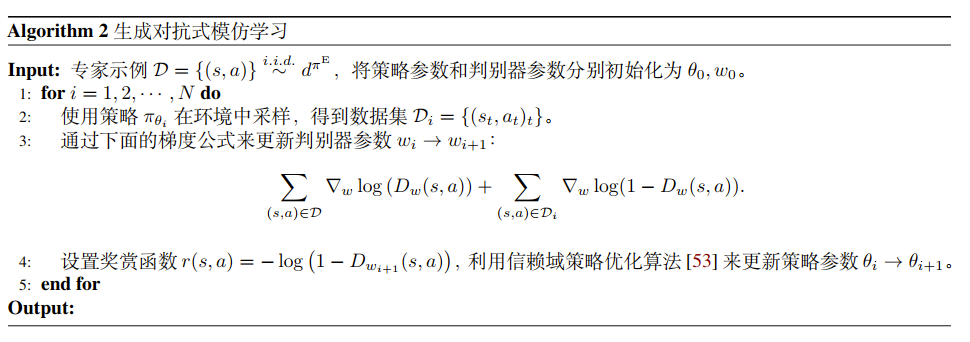
对抗博弈的目标:
- 内层循环 () : 的身份 GAN 里的判别器。 它的目的是找茬,它要设计一套奖励规则,使得专家得分很高,而你(智能体)得分很低 ,从而最大化你们之间的差距 。
- 外层循环 () : 的身份是 “学生”(生成器) 。它的目的是在考官制定的规则下,努力拿高分,从而最小化和专家的差距 。
怎么训练?梯度下降-上升 (Gradient Descent Ascent)
-
Step 1: 优化考官 (上升)
- 目标是让专家和策略的分布差异在 的加权下最大化。
- 使用在线投影梯度下降(因为 有范围限制 )。
-
Step 2: 优化学生 (下降/RL)
- 目标是最大化这个 Reward 下的回报 。
- 这本质上就是强化学习! 我们可以直接调用任何标准的 RL 算法(如策略梯度 PG、TRPO、PPO 等)来更新 。
都是在解同一个极小极大优化问题,区别只在于 “怎么定义距离” 以及 “怎么更新参数” 。
| 维度 | FEM (特征期望匹配) | GTAL (博弈论学徒学习) | GAIL (生成对抗模仿学习) |
|---|---|---|---|
| 1. 特征定义 () (核心区别) |
人工设计 / 已知 (Linear Features) |
人工设计 / 已知 (Linear Features) |
自动学习 / 隐式 (由神经网络判别器提取) |
| 2. 对应距离 () (优化目标) |
范数 (欧氏距离) |
范数 (最大范数/切比雪夫距离) |
JS 散度 (Jensen-Shannon Divergence) |
| 3. 奖赏函数的约束 (对偶空间的形状) |
球 ( ) |
球 / 单纯形 () |
隐式约束 (由判别器网络架构决定) |
| 4. 奖赏函数的更新 (对抗者怎么找茬) |
残差计算 (直接计算特征差值:) |
镜像下降 (指数乘法更新:) |
梯度上升 (训练二分类判别器) |
| 5. 策略的更新 (学习者怎么改进) |
混合分布 + 线搜索 (寻找步长混合新旧分布) |
标准 MDP 规划 (求解当前下的最优策略) |
策略梯度 (RL) (如 TRPO/PPO 更新神经网络) |
GAIL是GAN在RL领域的转型,本质是IL算法,但是在策略更新阶段使用RL,奖励信号来自奖赏函数。
以上是跳过历史直接得出的直观结论,接下来我讲回顾一下 学徒学习 和 对抗模仿学习 是如何统一的。
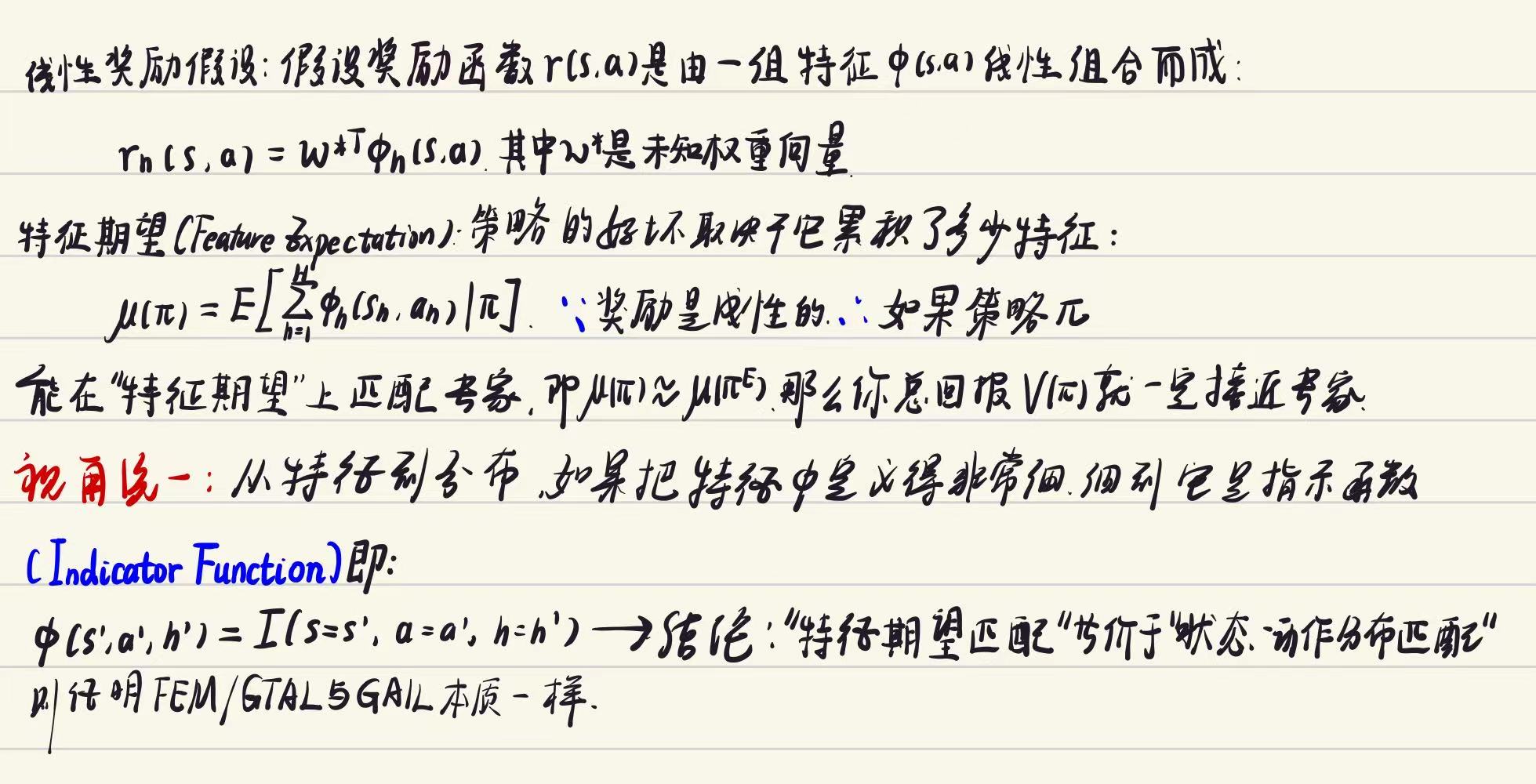
- 旧派 (FEM/GTAL) :觉得我在匹配特征期望(比如“专家这一局吃了10个苹果”,我也要吃10个)。
- 新派 (GAIL) :觉得我在匹配概率分布(比如“专家在坐标(10,10)出现的概率是0.5”,我也要是0.5)。
大家后来证明了: “分布”其实就是一种极致细腻的“特征”。
更高级的对抗模仿学习算法
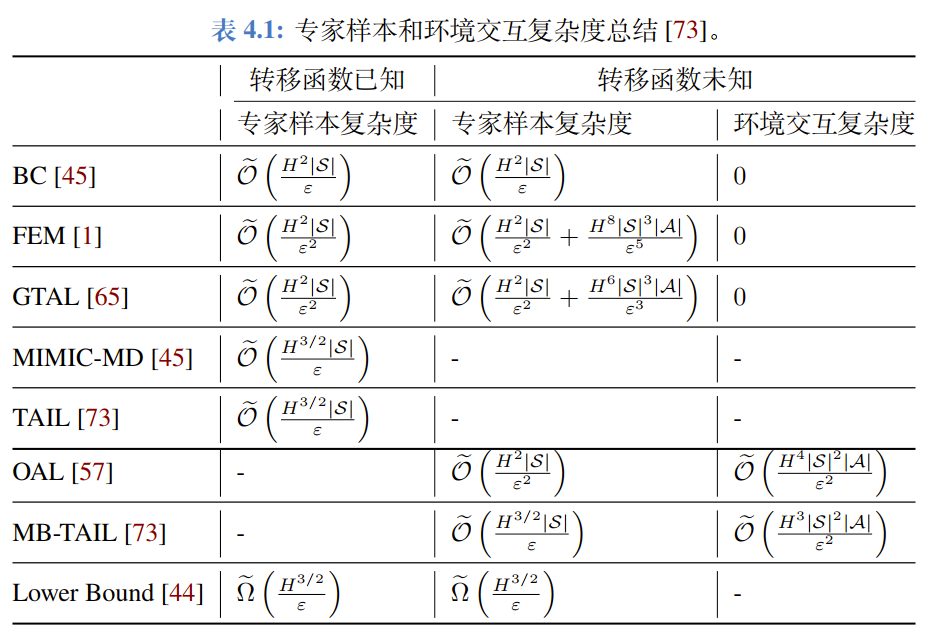
虽然 AIL 策略更稳健,但在 “最坏情况(Worst-Case)” 下,经典的 AIL 算法(如 GAIL、FEM)所需的样本复杂度并不比简单的 BC 好,甚至可能更差(BC 是 ,而 AIL 往往是 )。
- 潜台词:AIL 虽然方向对,但样本效率太低,需要太多的专家数据。
在本小节,我们假设算法已知环境的转移概率并且专家策略是一个确定性策略。
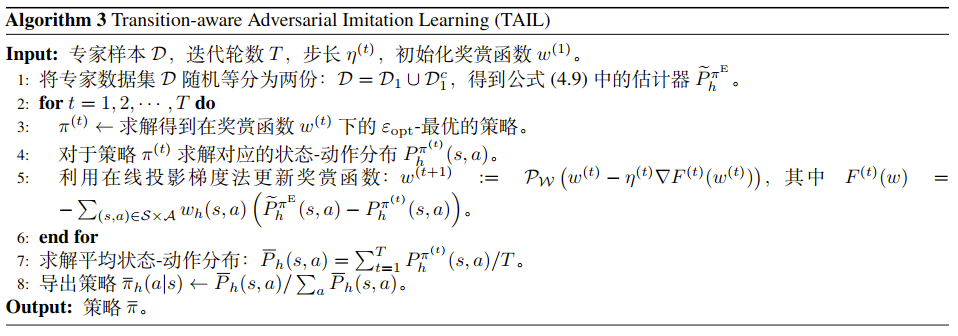
TAIL
分布分解公式 (4.9):

TAIL 把专家分布 拆成了两部分来估计:
- 第一部分(算出来的) :对于那些在 中完全被覆盖的轨迹,我们不需要估计!因为我们知道转移概率 ,我们可以精确计算出它们发生的概率。这一部分误差为 0。
- 第二部分(估计出来的) :只有那些“跑偏了”或者“没见过”的稀有轨迹(在 之外),我们才被迫用 的数据去进行统计估计。
-
初始化:切分数据,构造好那个聪明的估计器 。
-
循环迭代:
- 求策略 :在当前奖励 下,解 MDP 得到最优策略(因为假设已知环境模型,这一步比较容易)。
- 算分布:算出当前策略的分布 。
- 更奖励 :对比 (聪明的估计)和 (当前的策略),更新奖励函数来拉大差距。
-
输出:输出所有历史策略的平均混合策略。
在对抗模仿学习中,与其盲目地从数据中估计专家分布,不如利用环境模型(Transition)先精确计算出能算的部分,只估计算不出来的部分。 这种混合估计策略显著降低了方差,提升了学习效率。
MIMIC-MDMIMIC-Mixture Distribution(模仿-混合分布)
这个算法的核心哲学是: “守正出奇” 。
- 守正:在见过的地方,一定要和专家一模一样(Behavior Cloning)。
- 出奇:在没见过的地方,利用环境模型来规划,尽量不要跑偏(Distribution Matching)。
- 核心设定:强行模仿 (Constraints)。MIMIC-MD 比之前的 TAIL 算法更“保守”。它首先定义了一个策略集合 :
- 优化目标:


它的思想启发了后来的许多保守离线强化学习(Conservative Offline RL) 算法。
- TAIL:基于梯度下降-上升(GDA),类似于训练神经网络。
- MIMIC-MD:基于线性规划 (Linear Programming) 。因为它的约束是硬性的,且目标函数是线性的,所以可以转化为一个巨大的 LP 问题在多项式时间内求解。
- TAIL处理数据噪声能力或者非确定性策略表现时可能表现更好。
Debate
看图的诀窍:看斜率
教程给出了一个非常有用的公式:
这意味着在双对数坐标系下,Policy Value Gap 随样本量 变化的曲线斜率,直接反映了算法的阶数 。
- 如果斜率是 -1,说明 ,误差是 级别的(快)。
- 如果斜率是 -0.5,说明 ,误差是 级别的(慢)。
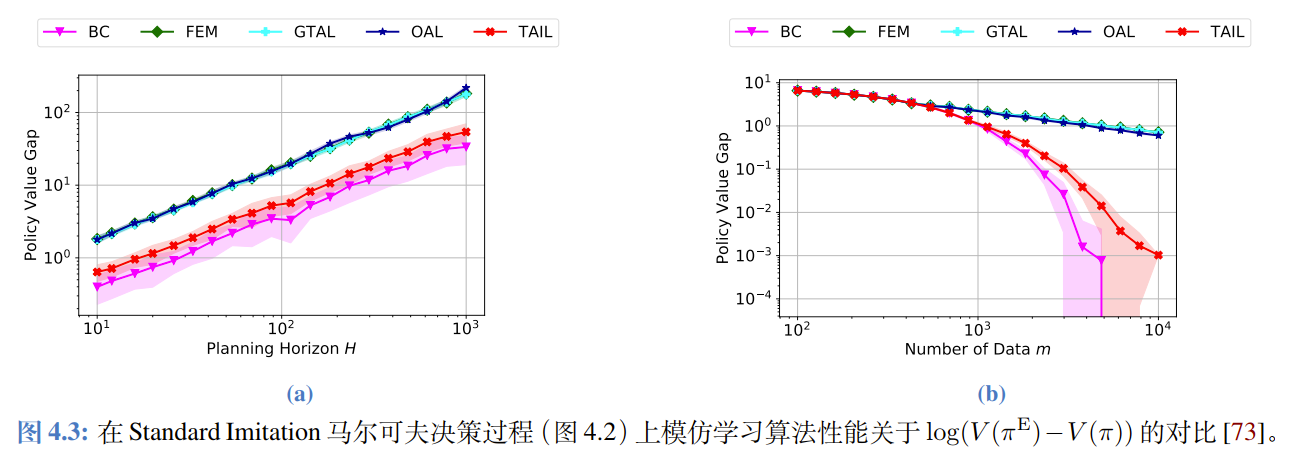
- BC 和 TAIL:红线和粉线掉得很快,斜率接近 -1。说明它们充分利用了数据,收敛快。
- FEM/GTAL/OAL:蓝线和青线掉得很慢,斜率接近 -0.5。说明它们受困于统计估计的低效,收敛慢。
- 结论:实验完美验证了理论——TAIL 通过利用“缺失质量(Missing Mass)”性质,成功修正了传统 AIL 的统计缺陷,达到了和 BC 一样的样本效率。
环境模仿
环境模仿学习
学习近似的Reward和Transition Function。
-
经验模型 的组成,包含三个核心要素的近似值:
- :近似的奖赏函数。
- :近似的转移函数。
- :近似的初始状态分布。
-
好处:
极大地降低了真实环境的样本复杂度。因为在虚拟模型里采样是免费且安全的,而在真实世界(比如真车、真机器人)里试错是昂贵且危险的。
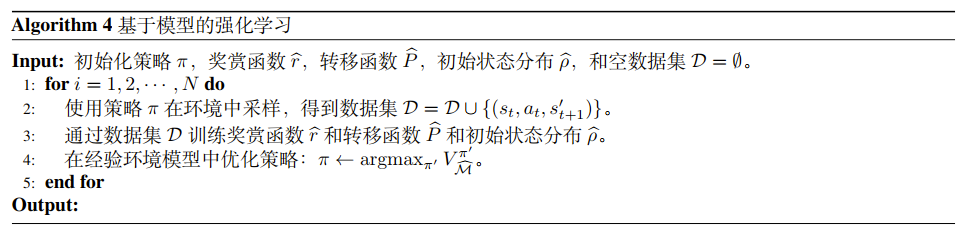
- 真实交互 (Sampling)
- 模型训练 (Model Learning):监督学习
- 策略优化 (Policy Optimization):目标是最大化虚拟世界里的回报 。
- 循环:策略变强了,再去真实世界收集更难的数据,回来更新模型,周而复始。
把“构建环境模型”这件事,看作是一种“模仿学习”。
-
困难模式:模仿转移函数 。
- 这是一个高维的条件概率分布。特别是当状态空间很大(比如图像)时,预测“下一帧会发生什么”是非常困难的。
基于行为克隆的环境模仿学习
对偶智能体(环境) :输入状态-动作对 ,输出下一个状态 。
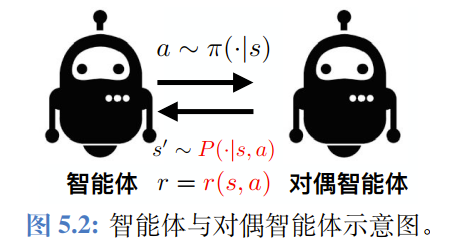
算法实现:MLE

在虚拟环境里推演未来时,你是用预测出来的 去预测 ,再预测 ……模型只要在 时有一点点误差,这个误差就会在后续的时间步里不断累积、放大,导致预测 100 步之后的世界和真实世界面目全非。
基于对抗式的环境模仿学习
-
建模变化:
- 之前的策略模仿:我们匹配的是状态-动作分布 。
- 现在的环境模仿:我们需要匹配状态-动作-下一状态分布 。
-
直观理解:
- 判别器(Discriminator)现在要看三个东西 。
- 它的任务是分辨:这个跳转 是真实物理世界发生的(Real),还是虚拟环境模型模拟出来的(Fake)?
- 环境模型(Generator)的目标是生成极其逼真的 ,骗过判别器。

它证明了如果我们用对抗训练(GAIL)的方法去学习环境模型,在进行策略评估时,误差随时间步的增长是线性的,而不是二次方的。但是依然存在样本效率降低的问题。
总结
- 出发点:从统计学的角度揭示模仿学习的本质。
- 问题:揭示了行为克隆 (BC) 的复合误差来源。
- 解决:介绍了对抗式模仿学习 (AIL) 如何通过分布匹配缓解复合误差。
- 反转:指出了传统 AIL 的统计缺陷(样本效率低),并介绍了 TAIL/MIMIC-MD 等新方法如何克服这一难题。
- 拓展:最后将思路应用到了环境模仿(构建虚拟世界)中。
五个“未完成”的主题
-
深度学习理论 (Non-finite State/Action Spaces)
- 内容:当状态和动作无限(如连续控制、图像输入)时,我们必须用神经网络(Transformer)做函数近似。这时除了统计问题,还有非凸全局优化的问题。
-
AggreVaTe 算法族
- 内容:除了 DAgger,还有一类基于 “Aggregate Values to Imitate” 的在线学习算法。利用价值函数来指导数据聚合。
-
⭐ 模仿与强化的结合 (IL + RL)
- 内容:在很多任务中,给定的专家策略可能不是最优的(例如人类操作不够完美,或者遥操作有噪声)。这时模仿学习只是 “铺垫” (Initialization/Warm-start),后续需要接强化学习来超越专家。
- 建议:可以去查阅文中标注的参考文献 [13, 23, 38, 60],看看前人是如何从 IL 平滑过渡到 RL 的。
-
VTR 类环境模仿 (Value-Targeted Regression)
- 内容:另一种构建环境模型的方法。它的目标不是让 预测得准,而是直接最小化 “估计的值函数与真实值函数的差异” 。
- 关联: 这是 Model-based RL 的一种高级形式,关注 “有用的预测” 而不是“准确的预测”。
-
⭐ 探索问题 (Exploration)
- 内容:对抗式模仿学习需要不断与环境交互。如何在学习过程中 平衡探索(尝试新动作 和 利用(模仿专家) 是一个核心难题。当然现在也有“Beyond探索利用”的工作,这个地方还存在争议。
祝贺您啃完了这块理论硬骨头! 有了这些理论打底,再看现在的 Diffusion Policy 或 OpenVLA 的论文,您会更容易看透它们是在解决什么本质问题(是解决分布偏移,还是解决样本效率)。再看一些MBRL以及Offline RL工作里面的一些方法,你也会发现很多东西都不是新东西。